
通过测试船舶的比例模型及其在各种条件下的行为,例如不同的波型和振幅,风类型和水流,可以预测有关实际船舶性能的信息。
NOKOV水下光学动作捕捉系统可对悬浮隧道及海洋工程结构进行高精度动态测量。通过构建水下三维追踪系统,实时获取结构位移、形变及六自由度姿态数据,实现亚毫米级测量精度和亚毫秒级同步精度。可应用于悬浮隧道、船舶工程、水下机器人及海洋科研等场景,为结构安全评估与运动机理研究提供可靠数据支持
NOKOV可提供机器鱼、水下AUV,潜艇、舰船、输油管道、缆绳等物体的运动捕捉,进行六自由度刚体识别
采集到的数据可以以VRPN形式传输,或通过SDK(C++语言)端口广播与ROS、Labview、Matlab(包含Simulink)等软件通信进行二次开发。

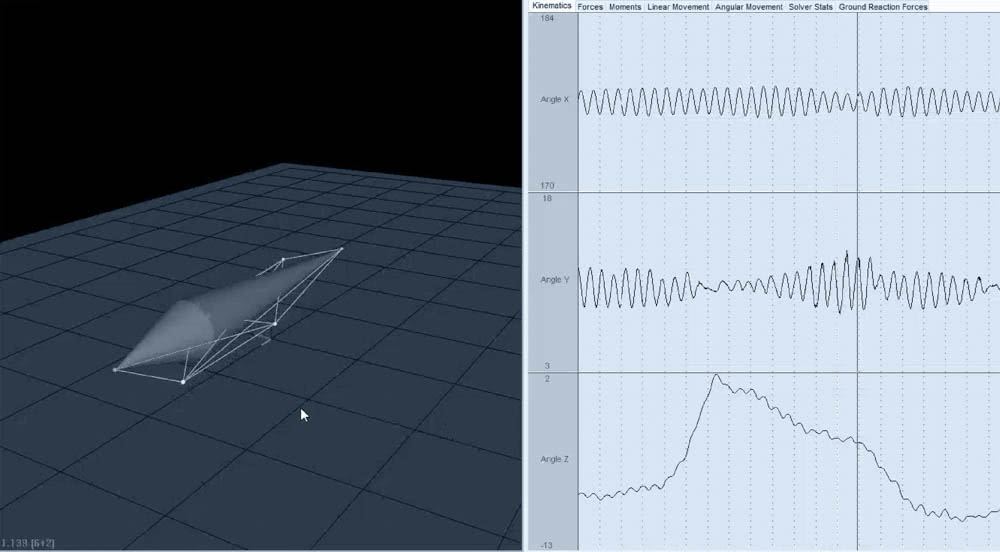
水下悬浮隧道的建设的技术核心在于隧道的动态控制和结构安全,要在波浪潮流复杂的动力体系下,保持它的结构的稳定性。 测量隧道的运动变形问题,是整个项目的重大难点,使用NOKOV(度量)光学三维动作捕捉系统,可获得这一高精度的测量数据。








