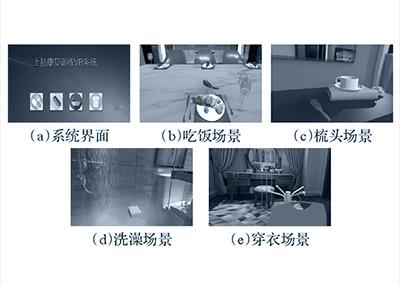
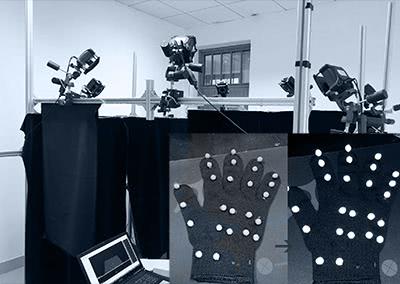
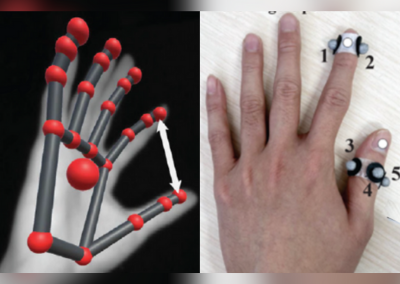
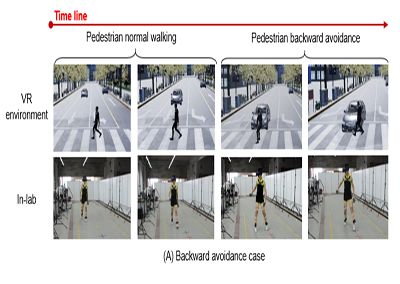
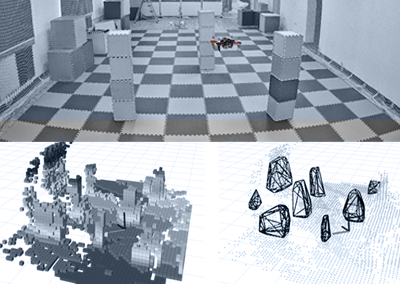
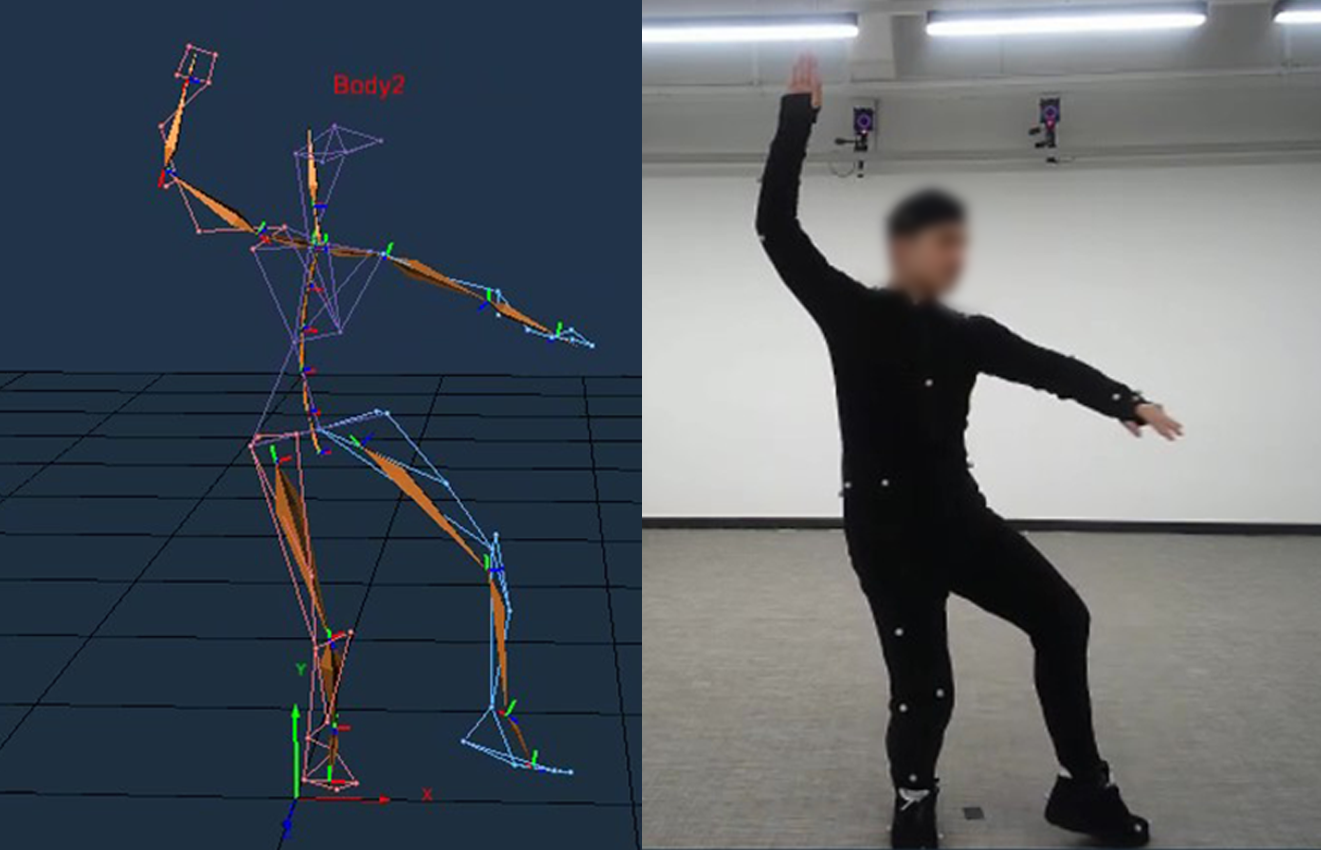
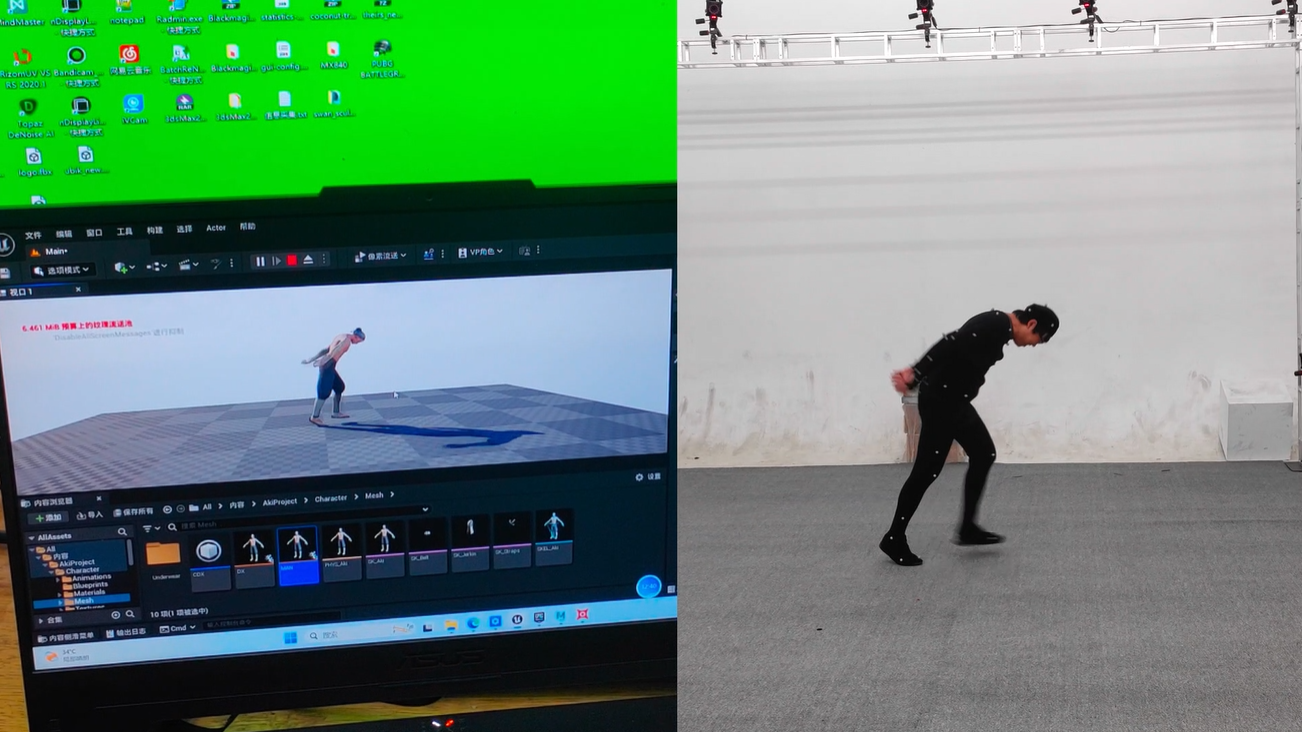
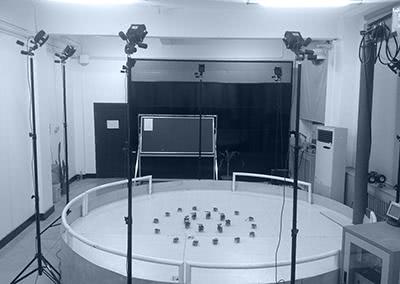
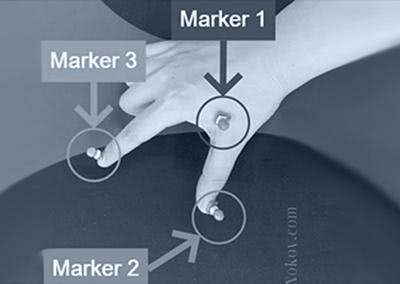
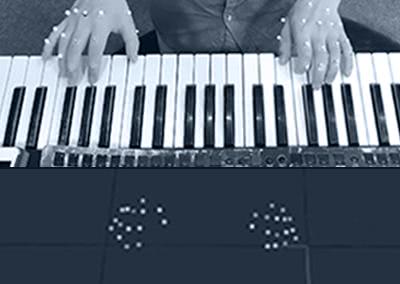
无需穿戴设备或粘贴标记点,韩国首尔大学医学院(SNUH)妇产科及韩国单孔腔镜手术学会(KSPS)采用NOKOV ASTRA AI Markerless无标记动作捕捉方案,仅4小时完成30位模拟腔镜手术参与者的全身运动轨迹记录与手术操作姿态采集。
人机对战羽毛球,央视上手过招
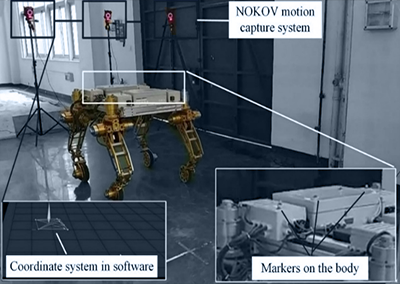
人机对战羽毛球,央视上手过招。度量动捕助力动易科技人形机器人与多人现场对战,精准接打、见招拆招。
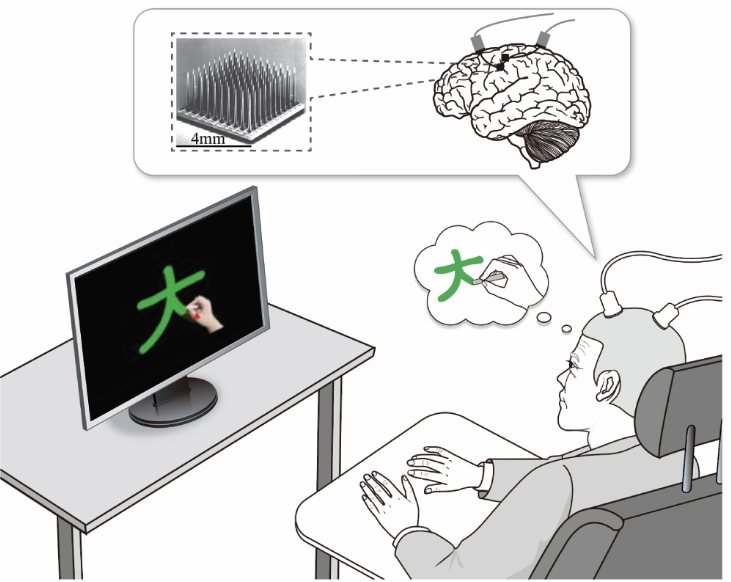
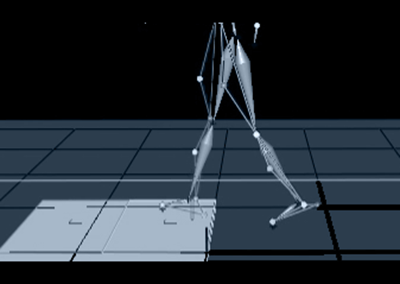
Nature Commun. 手写脑机接口 多维运动解码
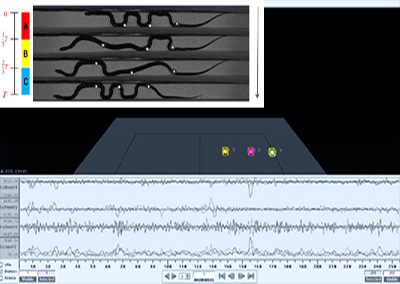
近日,浙江大学郝耀耀老师研究团队在Nature Communications上发表题为“Cortical representation of multidimensional handwriting movement and implications for neuroprostheses”的论文,首次系统揭示了大脑运动皮层对手写运动的多维编码机制,为下一代高性能手写BCI奠定了理论基础。这项研究不仅刷新了对运动控制的认知,更提供了一套全新的解码范式。
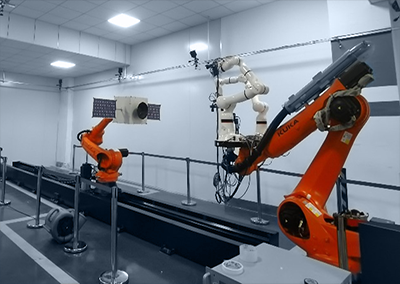
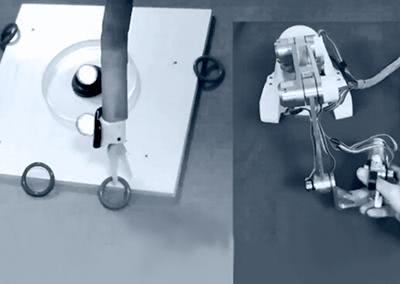
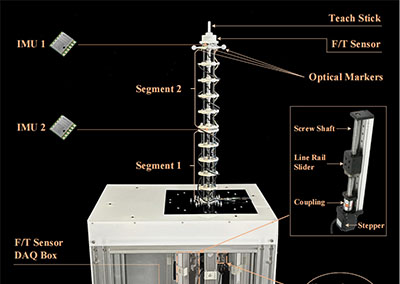
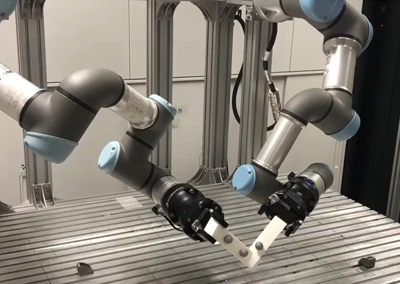
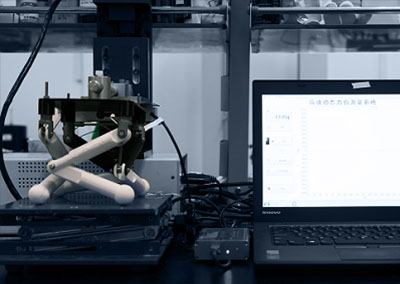
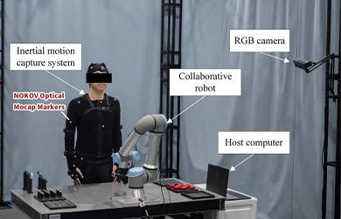
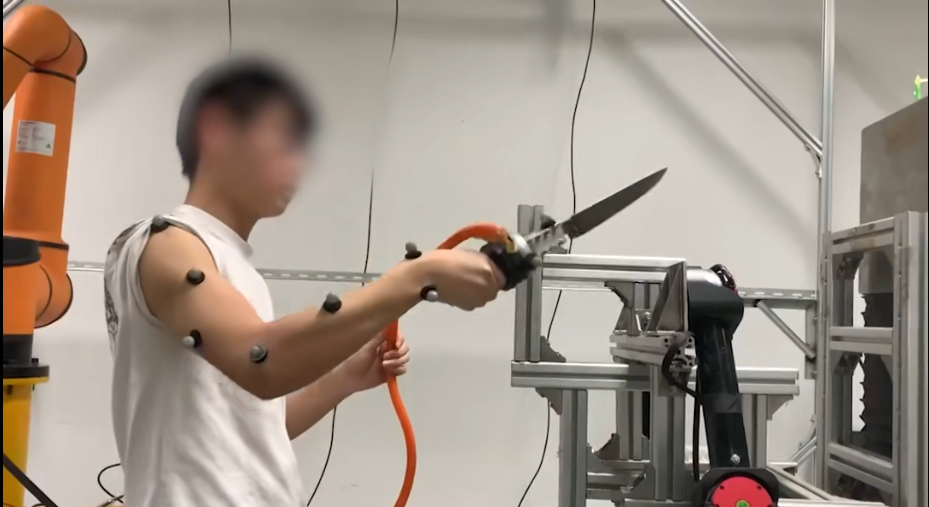
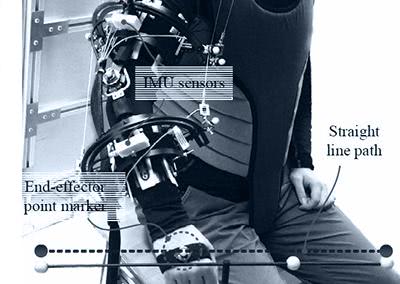
度量用户、慕尼黑工业大学手术机器人教授M. Ali Nasseri 与团队开发了首个用于眼科微创手术的机器人系统,帮助眼科医生进行视网膜手术。 在 IROS 2024 上,M. Ali Nasseri 教授因其学术成就入选由度量动捕发起的 New Generation Star Project。在本次采访中,Nasseri 教授介绍了其在手术机器人领域的研究工作,以及如何通过NOKOV度量动作捕捉系统实时重建手术环境、助力手术机器人高精度定位。
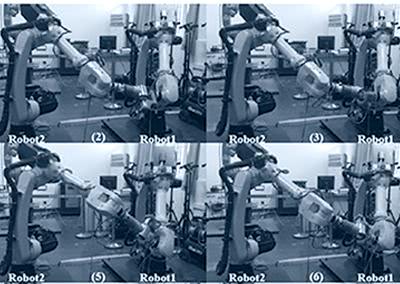
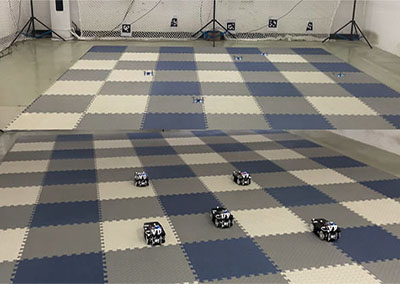
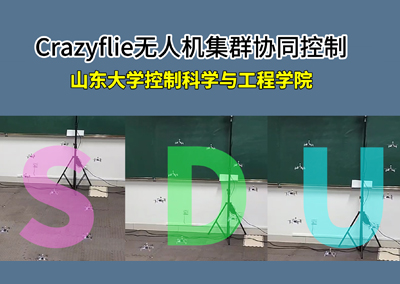
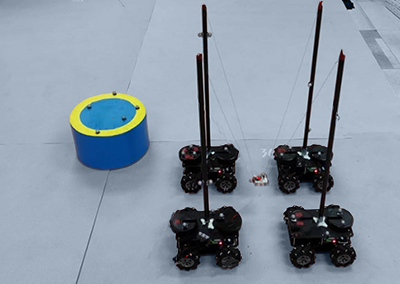
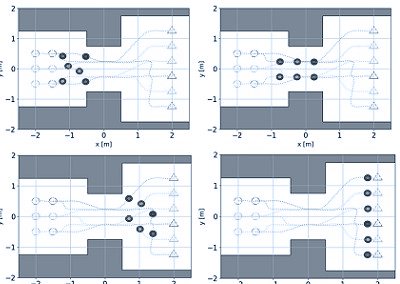
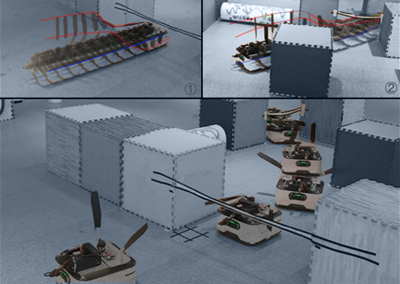
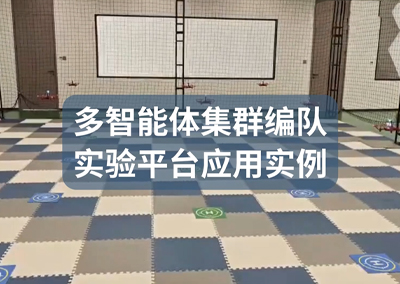
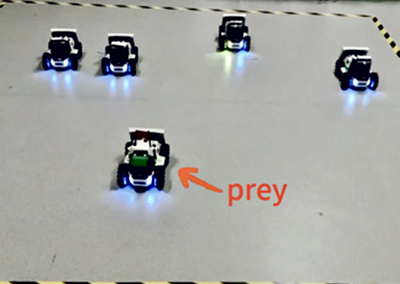
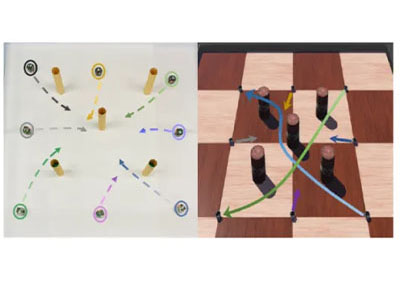
研究团队发表最新成果《Dynamic Formation Planning and Control for Robot Soccer Game with Multi-Agent Reinforcement Learning and Behavioral Model》:提出了一种机器人足球场景中的多智能体动态编队策略。通过用于进攻的行为模型和用于防守的强化学习,实现了队伍的攻防策略转换,适应不断变化的比赛情景。