
一项关于机器人学习和泛化的研究 ”Demonstration Learning and Generalization of Robotic Motor Skills Based on Wearable Motion Tracking Sensors” 在中科院工程技术类二区期刊IEEE TRANSACTIONS ON INSTRUMENTATION AND MEASUREMENT上发表,论文被SCI和EI收录。
研究团队提出了一种基于可穿戴惯性传感器的机器人示教学习和泛化的方法,利用NOKOV光学动作捕捉系统作为“金标准”,验证了自研的可穿戴惯性动作捕捉系统的精度。作者将优化的示教轨迹传入动态运动基元DMP进行学习,使用改进的算法PIBB-CMA进行噪声探索和轨迹泛化,让DMP学习生成的轨迹以不失真的形式经过指定的泛化点。研究为提高机器人智能提供了可能,在机器人技能学习方向上具有应用前景。
引用格式
X. Liu, Z. Wang, J. Li, A. Cangelosi and C. Yang, "Demonstration Learning and Generalization of Robotic Motor Skills Based on Wearable Motion Tracking Sensors," in IEEE Transactions on Instrumentation and Measurement, vol. 72, pp. 1-15, 2023, Art no. 2519515, doi: 10.1109/TIM.2023.3288240.
研究背景
传统的机器人编程方法是针对特定任务而设计的。当遇到不同但相似的任务时,机器人需要重新编程。为了降低适应成本,机器人在变化场景中的自适应和自组织问题亟待解决。如何提高学习模型的泛化能力,同时保证复杂环境下任务的可靠执行是极具挑战的问题。
实验及结果
A. 定位精度的验证:
鉴于轨迹跟踪精度在机器人控制和示教轨迹方面的重要性,研究团队采用了NOKOV度量光学动作捕捉系统对自研的惯性动捕运动轨迹精度进行评估。NOKOV度量光学动作捕捉系统的参数见表1。
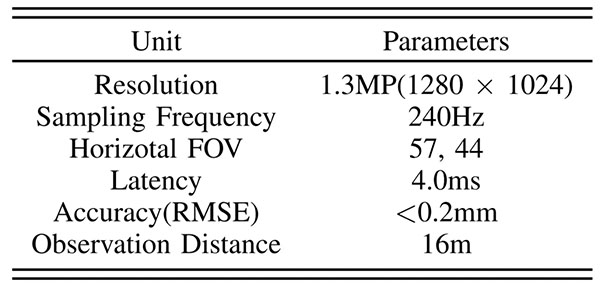
表1 NOKOV度量光学动作捕捉系统参数
NOKOV度量和本文自研系统的对比实验场景如图1所示。被测人在示教前10-15秒左右的初始标定期内需保持静止。一旦初始标定完成,本文自研动捕系统能够实时捕获每块骨骼的三维轨迹。作为对照组的NOKOV度量光学动捕反光标记点被放置在人的手上以及每个传感器节点的中心。8台高速光学摄像机从不同角度跟踪反光标记点,以捕捉手部的运动轨迹。
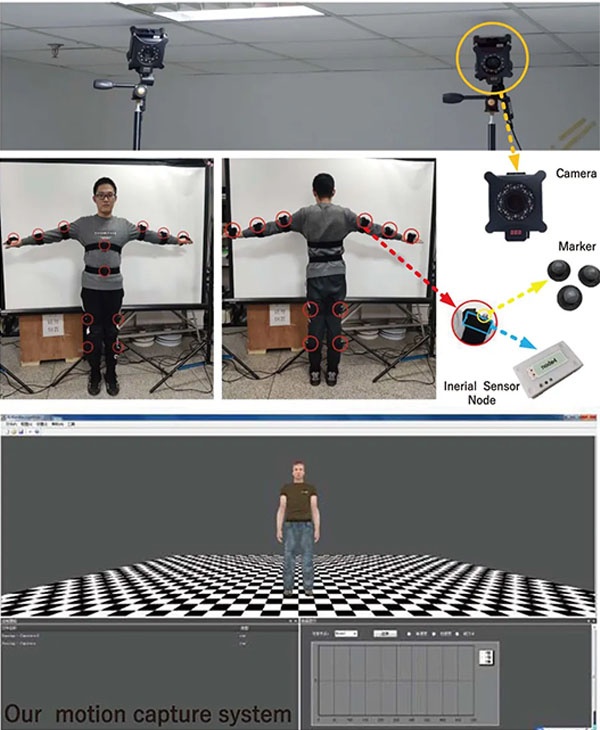
图1 NOKOV度量光学动作捕捉系统参数
结果表明,惯性法计算轨迹与NOKOV度量光学动捕轨迹在X、Y、Z轴上的位置相关系数分别为0.9876、0.9912和0.9991,证明本文方法的有效性和估计误差的成功控制。
B. 示教学习(LfD)的手写验证:
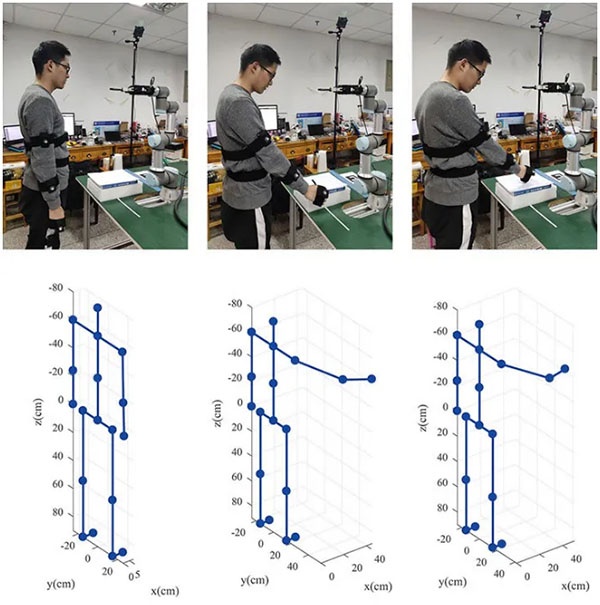
图2 惯性法捕捉到的人体手写示教过程
本节使用惯性传感器来记录示教轨迹。在计算人类关节的运动轨迹后,如图2所示,作者利用本文方法泛化轨迹,并在模拟环境和真实场景中执行书写任务。与其他三种基线方法CEM、CMA-ES、PIBB相比,本文提出的PIBB-CMA法迭代次数最低,训练时长最短。说明本文方法在收敛速度方面具有良好的性能。真实机械臂与理想手臂的字母书写轨迹基本一致,表明本文方法可以在实践中很好地应用。
C. 避障的有效性:
研究团队使用了PIBB-CMA泛化的轨迹,让机械臂成功完成避障和抓取任务,穿过指定的区域,最终到达指定的终点。图3比较了初始轨迹、用避障算法得到的轨迹和用PIBB-CMA得到的泛化轨迹。NOKOV度量光学动作捕捉系统捕捉到的轨迹和图3中的三条轨迹一致。该算法同样通过了组合障碍物的避障测试。在保持原始轨迹形状的情况下,取得了良好的泛化结果。
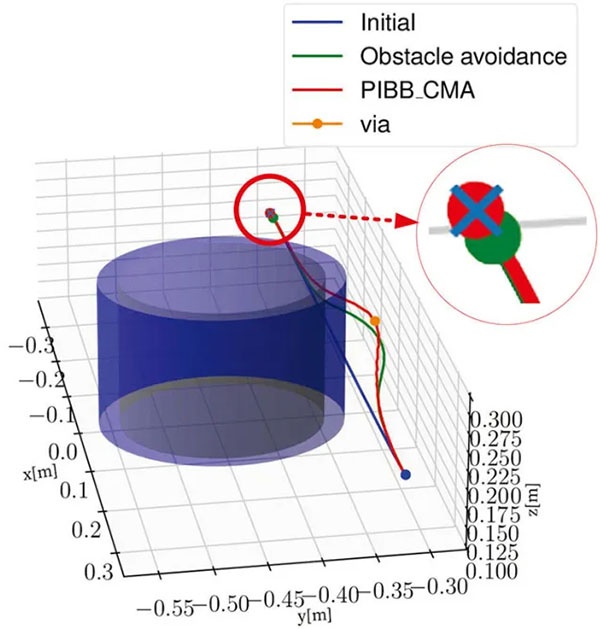
图3 初始轨迹、避障轨迹和泛化轨迹的比较
研究团队未来将涉及与家庭护理机器人相关的应用场景,并将设计更复杂的任务和约束条件,以提高算法的适用性。
NOKOV光学动作捕捉系统作为“金标准”,验证了本文提出的可穿戴惯性动作捕捉系统的精度。
作者简介
刘小峰,河海大学人工智能与自动化学院院长、教授、博士生导师;江苏省特种机器人技术重点实验室副主任。英国曼彻斯特大学名誉教授。主要研究方向:人机互动,社交机器人,生物启示的导航技术,神经工程,物联网。
王子洋,河海大学人工智能与自动化学院硕士已毕业,主要研究方向:深度学习、人工神经网络、机器臂路径规划。
李杰,南京医科大学生物医学工程与信息学院副教授,主要研究方向:智能穿戴,情感交互机器人。
Angelo Cangelosi,曼彻斯特大学(英国)机器学习与机器人学教授、曼彻斯特机器人与人工智能中心联合创始人、主任。主要研究方向:认知与发展机器人学、神经网络、语言基础、人机交互与信任,以及用于健康和社会护理的机器人伴侣。
杨辰光,利物浦大学计算机科学系机器人学讲席教授。主要研究方向:机器人控制与学习、人与机器人的物理交互、遥操作。






