
Crazyflie系列是专为科研场景设计的开源微型无人机平台,整机重量仅27克至31克。可通过Crazyradio进行低延迟远程无线传输,支持移动设备和游戏手柄控制。
Crazyflie系列微型无人机安全可靠,具有良好的飞行稳定性、耐用性和扩展性,适合在室内小空间高密度的环境中进行无人机研究。
使用开源软件和固件,完全可编程,带有可扩展甲板系列并且支持整个无人机生态系统。
整体设计轻巧紧凑,坚固耐用,是最小的多功能无人机之一。
Crazyflie品牌拥有活跃的用户社区和专业的售后支持,提供全栈式无人机研发解决方案。

Crazyflie系统采用模块化设计,通过标准化接口实现硬件-算法-定位的无缝衔接,由三大模块构成:
包含Crazyflie系列无人机、Bolt飞行控制器等。
通过Crazyradio与无人机通信,可同时实现移动端和游戏手柄控制。
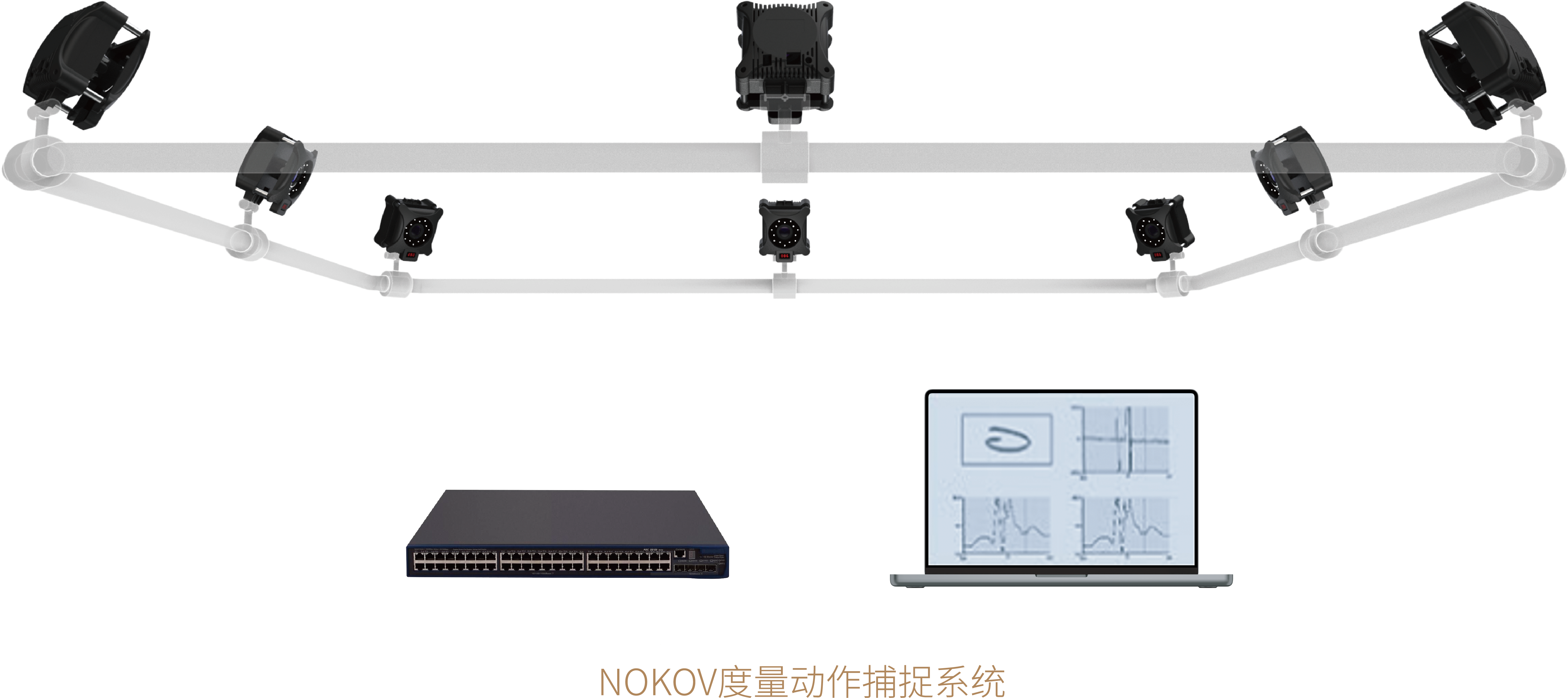
内置Lighthouse定位系统和基于超宽带的定位系统,还可以与动作捕捉系统集成。光学三维动作捕捉系统定位精度达到亚毫米级,可通过ROS接口与Crazyflie系统实现通信。

| 参数 | 数量 | |
| 像素 | 2.2MP |
|
| 分辨率 | 2048×1088 | |
| 频率 | 380FPS | |
| 延迟 | 2.4ms | |
| 精度 | ±0.15mm | |
| 观测距离 | 21m | |
| 视场角 | 70°×40° | |
| 反光标识(marker) | 12mm & 15mm 若干 |
| 参数 | 数量 | |
| 起飞重量 | 27克 |

|
| 尺寸(宽x高x深) | 92x92x29毫米(电机到电机距离,包含电机安装脚) | |
| STM32F405主应用MCU | Cortex-M4架构,168MHz主频,192KB SRAM,1MB闪存。 | |
| 三轴加速度计/陀螺仪 | 采用BMI088传感器。 | |
| 高精度气压传感器 | 采用BMP388传感器。 | |
| 标配电池飞行时间 | 7分钟 | |
| 标配电池充电时间 | 40分钟 | |
| 最大推荐负载重量 | 15克 |
| 参数 | 数量 | |
| 支持集群与ROS | 适用于集群操作及机器人操作系统(ROS) |

|
| STM32F405主应用MCU | Cortex-M4架构,168MHz主频,192KB SRAM,1MB闪存 | |
| 三轴加速度计/陀螺仪 | 采用BMI088传感器 | |
| 高精度气压传感器 | 采用BMP388传感器 | |
| 4个08028-10000KV高质量电机 | 每个电机可产生高达30克的推力 | |
| 标配电池飞行时间 | 10分钟 | |
| 标配电池充电时间 | 60分钟 | |
| 最大推荐负载重量 | 40克 | |
| 2.4GHz ISM频段无线电 | 支持2.4GHz工业、科学和医疗频段通信 |


