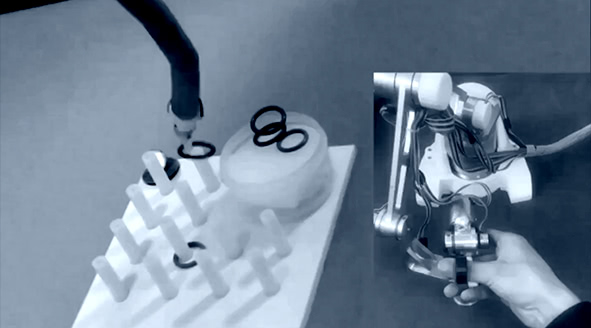
进行微创手术(MIS)时,手术器械需要经过小创口或自然腔进入人体,避开器官经过复杂路径到达手术部位。使用刚性工具时,不论是传统的外科医生手持器械的方式,还是机器人辅助方式(如达芬奇手术系统),灵活性和操作精度都会受限。
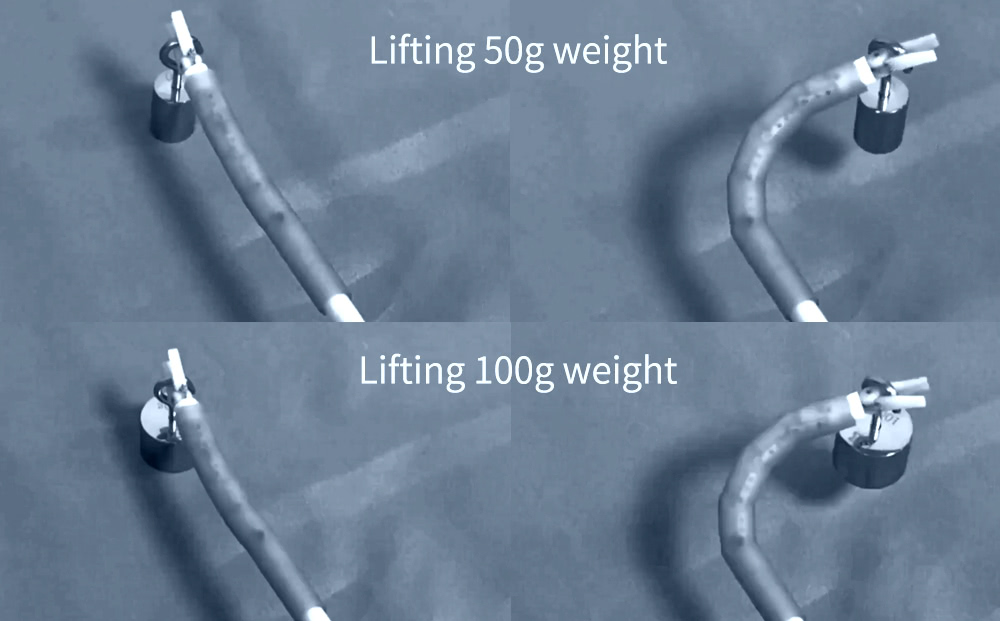
连续体机器人具有连续弯曲的结构,可以绕障碍物运动,是一种很有前景的MIS替代方案。系统功能。在开发连续体机器人时,可以利用动作捕捉系统:建立动力学模型,分析连续体结构的模态频率和振型等模态特性(针对弹性材料结构),捕捉连续体机器人末端轨迹做真值(ground truth),评估机器人性能(计算真实轨迹与轨迹轨迹均方根误差)
手术导航系统主要由两部分组成:NOKOV光学动作捕捉相机和带有导航标记点的手术器械。动作捕捉相机通过跟踪并解算标记点的三维坐标,可以实时获取手术器械在空间中的XYZ三维坐标以及姿态信息。利用手术器械的六自由度数据,结合患者术前采集的图像实现可视化导航。

在手术导航应用中,高测量精度可以协助医生更精确、快速地定位身体中微小的病变区域,有助于缩短手术时间并减少手术侵入性,改善患者的治疗效果。NOKOV动作捕捉系统的定位精度可以达到0.1mm级。
对于不同的手术环境(场地大小、设备遮挡等)可以灵活选择镜头布置方案。还有免标定系列镜头,即插即用。
吉林大学冯美老师提出了一种主机械手的结构优化方法。基于人机工程学和运动学,建立了 主机械手工作空间和灵巧度的优化指标。实验中,利用NOKOV动作捕捉系统捕捉连续体机器人末端轨迹作为真值,评估机器人性能。实验证明,该优化方法能保证主机械手具有较大的工作空间和良好的运动性能