精确量化、记录和分析人手在执行复杂、精细操作(如抓握、捏取、操作工具、手势表达)时的运动轨迹、关节角度、速度和加速度,实时捕获手部所有关键关节(腕关节、掌指关节、近端/远端指间关节、拇指各关节)在三维空间中的位置和姿态数据。构建详尽、真实的人手运动学数据库,理解灵巧操作的生物力学原理,为仿生设计提供基础数据。
动作捕捉数据提供精确的关节角度目标轨迹或末端执行器(指尖)的期望路径,用于训练控制策略或作为闭环控制的参考输入。同时,动作捕捉系统可实时监测机器人手的实际运动,与目标轨迹进行对比,验证控制算法的精确性和鲁棒性。加速机器人灵巧手在复杂操作任务(如非结构化物体抓取、精细装配、柔性物体操作)上的学习和表现,使其动作更自然、高效、类人化。
动作捕捉系统实时跟踪操作员手部姿态和动作,通过映射算法(运动学映射、缩放、障碍规避等)转换为机器人灵巧手的控制指令。探索人-机器人灵巧手在共享工作空间中的协作机制、任务分配和交互流畅性。
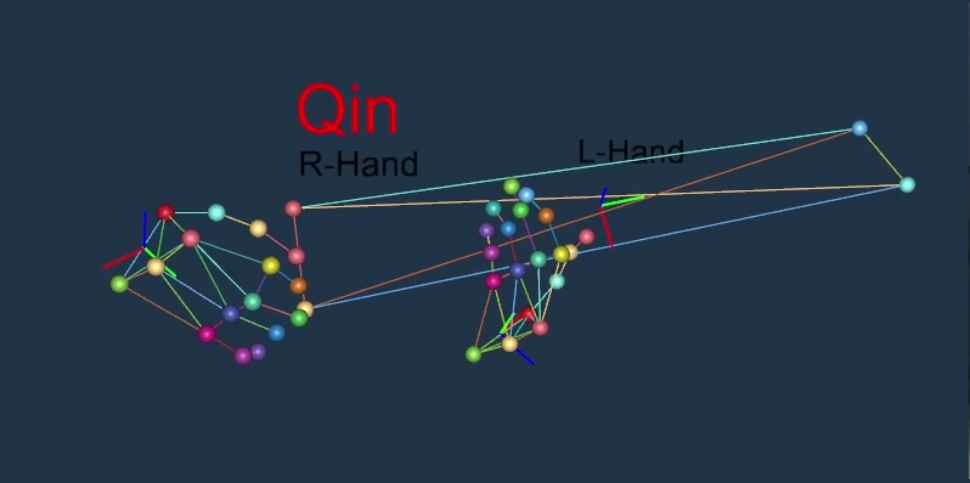
指尖、关节标记点的三维空间XYZ坐标,计算得到手掌及指骨的六自由度姿态(6DoF)、关节的屈/伸、外展/内收角度(对应Pitch/Yaw/Roll等欧拉角变化)等数据,为仿生灵巧手的运动控制学习、遥操作映射及精细动作规划提供高精度、低延迟的动作数据基础。
采集到的数据可以以VRPN形式传输,或通过SDK(C++语言)端口广播与ROS、Labview、Matlab(包含Simulink)等软件通信进行二次开发。

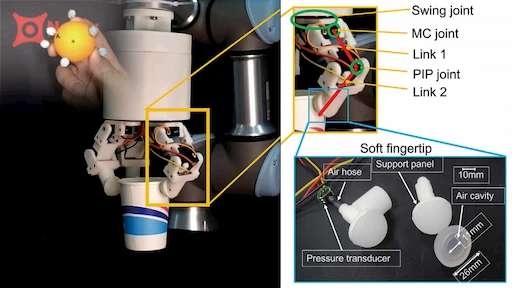
本研究提出了一种仿生的三指机械手对象连续自适应操控方法。通过NOKOV动作捕捉系统实时跟踪物体姿态,并验证所提出的控制策略,使机械手即便在外部干扰下也能实现稳定、可靠的操作。