
燕山大学许允斗老师研究团队基于切比雪夫连杆研发的六足载重机器人,其腿足结构与多驱动系统经优化后可实现高刚性轻量化20kg载重与多地形适应能力,为复杂环境作业提供新型解决方案。相关研究论文“Development of a Load‐Bearing, Terrain‐Adaptive Hexapod Robot With Chebyshev‐Linkage Legs” 发表于机器人领域的中科院二区期刊Journal of Field Robotics。
NOKOV度量动作捕捉系统为验证机器人模拟运动与实际运动的差异提供了位姿数据,数据显示理论值与实际值基本重合,证明了理论分析的正确性。
引用格式
Ju, Z., Wu, R., Guo, D. and Xu, Y. (2025), Development of a Load-Bearing, Terrain-Adaptive Hexapod Robot With Chebyshev-Linkage Legs. Journal of Field Robotics. https://doi.org/10.1002/rob.22463
研究背景
传统轮式机器人在复杂未知地形中的动态调整和稳定移动存在不足,研究人员受动物能力启发设计的足式机器人能更好应对复杂地形。但足式机器人过多的驱动关节会增加故障率并影响负载能力,因此优化驱动关节数量、提升负载能力成为研究重点。在此背景下本研究基于切比雪夫连杆设计展开对六足机器人负载能力和驱动系统优化的相关研究。
本文贡献
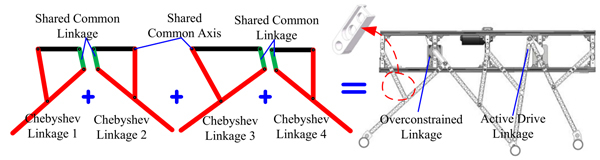
本文提出了一种新型腿足结构设计——HexaBeast,该设计融合了基于切比雪夫连杆的过约束腿足架构、高刚性低摩擦原则以及多驱动系统,以提高机器人在雪地、沙地、水坑、冰面和沙漠等多种地形中的适应能力。
系统设计
整体平台设计:六足机器人采用切比雪夫连杆结构,由步进电机驱动,配合机身内舵机和直线电机实现横向移动与腰部扭转。
创新腿部结构:腿部由四个串联切比雪夫连杆组成超静定结构,减少驱动关节数量,避免复杂传动,提升承载力。
特殊机架设计:设计多驱动协同横向移动机架结构,实现机器人横向移动。非横向移动时,机身可扭转适应地形。
HexaBeast 机器人的腿部结构图
特性分析
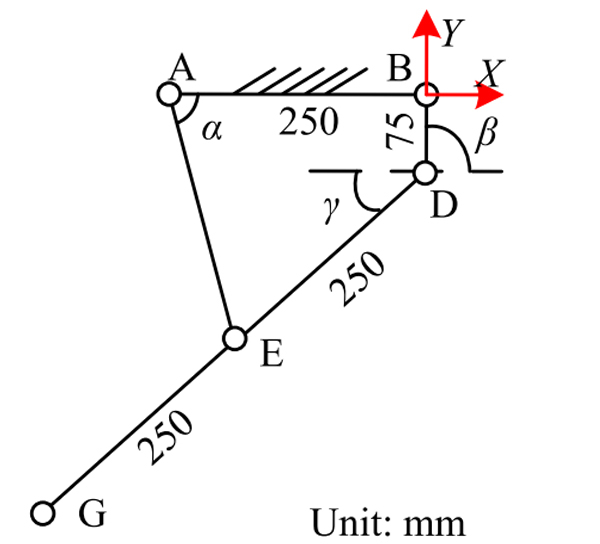
切比雪夫连杆长度参数分析:AE 连杆长 250mm时,能保证一定越障能力并将机身波动控制在最小。
腿部力学静态分析:过约束结构相比非过约束结构,刚度高、变形小、力分布更优,特定角度下腿杆端点受力更小。
比较运动过程中腿杆受力情况:过约束结构在机器人运动时也能改善腿部受力情况。
特性分析表明优化切比雪夫连杆长度、采用过约束腿结构,能提升机器人性能和承载能力。
切比雪夫连杆的长度参数
现场实验
运动验证实验:通过NOKOV度量动作捕捉系统采集机器人运动数据来验证其模拟运动与实际运动的差异。实验中共使用12个捕捉摄像头对随机选择的六个点(KR、MR、HR、BR、BL 和 ML)进行数据采集。结果显示模拟与实际运动基本重合,验证了理论分析的正确性。
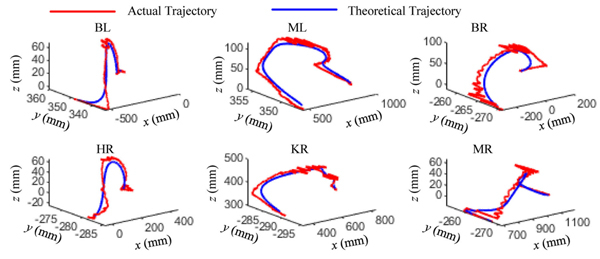
理论值(蓝色)与实际值(红色)的对比曲线
环境适应性及其他性能实验:实验证明机器人在冰面、雪地、泥泞路面及沙地环境中行走性能良好。斜坡实验中成功通过 10.77° 的斜坡。模拟腿部被困实验中能成功脱困并通过河床地形测试。转向实验中,机器人两种转向步态可稳定运行。横向移动实验中,5kg负重情况下横向移动正常。经负载能力实验确定机器人最大载重为 20kg。
环境适应性及其他性能实验
NOKOV度量动作捕捉系统为本研究验证机器人模拟运动与实际运动是否存在差异提供了位姿数据,助力证明理论分析的正确性。
作者简介
鞠忠金(共同一作),燕山大学机械工程学院机械电子工程博士在读。主要研究方向:可重构足式机器人结构研究,足式机器人稳定性控制研究
吴睿(共同一作),燕山大学机械工程学院硕士毕业生,现于西部超导从事超导磁体设计相关工作。主要研究方向:多足机器人构型设计
郭大猛,燕山大学机械工程学院机械电子工程硕士在读。主要研究方向:多足爬壁机器人
许允斗(通讯作者),燕山大学机械工程学院系主任、教授、博士生导师。主要研究方向:特种机器人、可展机构、混联机构






