协同控制提高智能体系统鲁棒性,编队避障是重点
随着工业技术的发展,任务复杂程度和规模逐渐增加,单个智能体获取信息及解决问题的能力有限,在多数情况下无法满足任务要求。而多智能体系统分布式协同控制系统强调单体之间的合作与协同,多体协同控制可以大幅提高工作效率和能力。目前,针对多智能体复杂系统协同控制的研究存在很多,包括智能体之间协同方式、通讯方式以及避障方法等,其中主要的就是多智能体仿真平台编队避障控制算法的研究。
光学定位系统亚毫米级定位,助力智能无人集群系统
中科院自动化研究所蒲志强老师团队研究开发出智能无人集群系统。该无人集群系统分为三个子系统,定位子系统、通信子系统与控制子系统,可实现单体无人车和无人机控制、地空协同、集群对战以及无人车、无人机编队表演等功能;可用于青少年科普、教育培训、高校或科研院所的深度二次开发、以及区域物流、军民融合等行业应用领域。

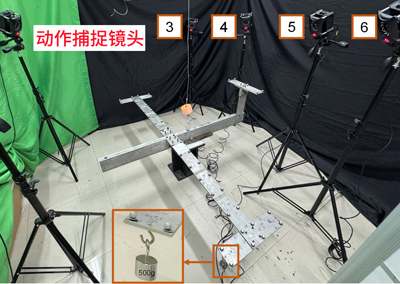
其中定位系统融合使用NOKOV光学动作捕捉系统与车载的惯性单元作为空间定位系统。考虑到捕捉范围,架设了24台Mars2H光学定位相机,其中在5m高度平面布置8台相机,8.5m高度平面布置16台相机,覆盖12m*12m*8.5m的空间。

各个移动机器人及障碍物上放置反光标志点,不同标志点排布形式用于区分机器人个体的ID。通过捕捉移动机器人及障碍物上反光标志点,得到标志点的三维坐标,利用SDK向外实时广播。单个机器人可以接收到本体、邻近移动机器人以及障碍物位置信息,坐标信息精度达到亚毫米级。

由于NOKOV光学定位系统定位精度高于惯性导航器件几个数量级,在移动机器人能接收到的光学定位传输的数据时,使用光学定位系统进行定位并校正惯性传感器数据的累计误差,保持机器人自身存储数据与光学定位系统数据一致;在某一时间段遇到有遮挡无法得到定位系统传输的数据时,使用惯性传感器的存储数据进行定位,保证移动机器人能正常运行。
该多移动机器人系统采用了时空A*算法和人工势场法相结合的方法进行避障。在该方法中,时空A*算法作为全局的路径规划算法为多机器人系统规划出无碰撞的路径。其中,该算法是在传统的A*算法的基础上加入时间的维度,并且以预约表的形式来存储之前已经规划好的多机器人路径信息,借助这些信息,以此来为下一个机器人生成无碰撞路径。其次,人工势场法作为局部路径规划算法加强此方法在动态环境中的稳定性。当面对环境中未知的动态障碍物,移动多机器人能够及时的避开。因此,结合时空A*算法和人工势场法作为避障方法能够为多机器人系统生成高效的无碰撞的路径,使其很好的完成避碰。
此外,整套多机器人系统应用于科学普及和教育培训方面。关于科学普及,该系统针对于中小学生、科普场馆、大型科普活动提供表演、互动等项目,其次,还提供详细有趣的科普课程。在教育培训方面,首先可以基于该系统进行二次开发技术研究,然后提供涉及该系统和人工智能方面的课程体系,再者,针对于各大研究机构,提供实验室建设技术方案。
中国科学院自动化所飞行器智能技术创新团队由研究员,副研究员,工程师,博士、硕士研究生等共20余人组成。团队长期从事无人自主平台鲁棒自适应控制、群体智能等方面研究,在应用基础研究、工程系统开发及产业化等方面取得了一系列重要成果。