
南京理工大学郭毓教授团队在ICRA 2025上发表关于腱驱动连续体机械臂(TDCM)的论文 Command Filtered Cartesian Impedance Control for Tendon Driven Continuum Manipulators with Actuator Fault Compensation。本文提出了一种结合阻抗控制与容错控制的方案,旨在解决TDCM在复杂环境中面临的两大挑战:
1. 高精度轨迹跟踪和柔顺力控
本文提出了一种有限时间笛卡尔阻抗控制方案,通过二阶低通滤波器根据末端接触力实时调整参考轨迹,并结合有限时间命令滤波反步法设计了控制器。利用李雅普诺夫函数证明系统的有限时间收敛性,确保了高精度轨迹跟踪和柔顺力控。
2. 执行器故障导致的系统性能下降
针对肌腱拮抗效应和驱动器响应滞后引发的执行器部分失效问题,本文创新性地构建了故障模型,并基于张力传感器信息设计了补偿算法,动态调节肌腱张力,显著提升系统的可靠性和鲁棒性。通过实时检测执行器的健康状态并进行补偿,即使在部分执行器失效的情况下,系统仍能保持稳定运行。
实验验证:
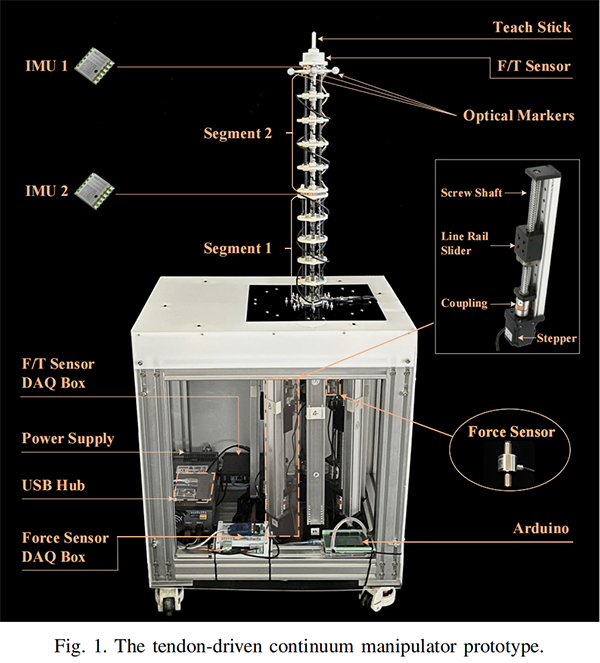
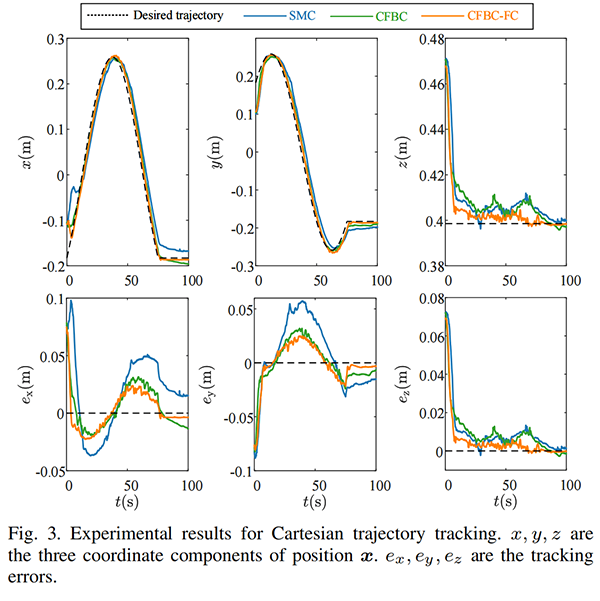
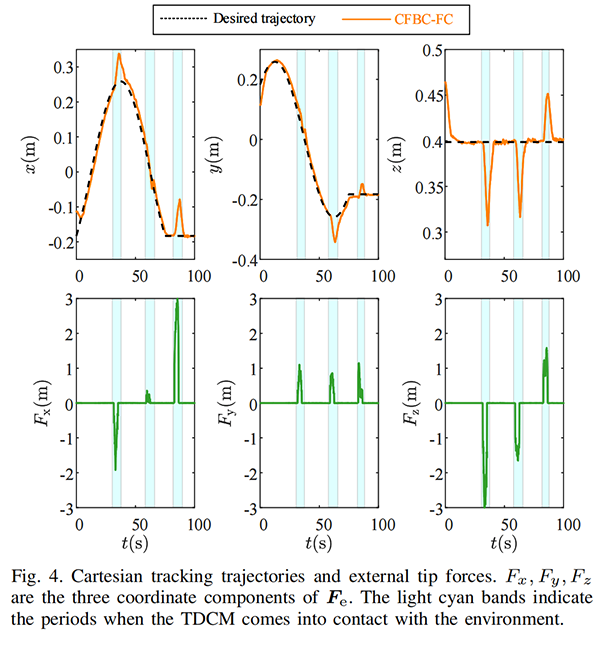
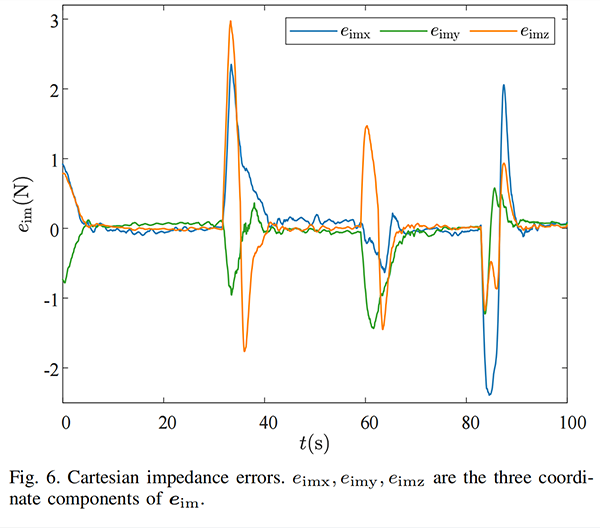
实验在两段式TDCM原型机(图1)上进行,验证了所提出方案的有效性。实验结果表明,轨迹跟踪精度达到了0.005米,比基线方法提高了50%以上(图3)。接触障碍物时,阻抗误差稳定在0.09牛顿以内,并在脱离障碍物后能够快速恢复轨迹跟踪(图4)。这些结果表明,结合阻抗控制与容错控制的方案不仅实现了高精度轨迹跟踪,还在与环境交互时表现出良好的柔顺性,同时显著提高了系统鲁棒性。
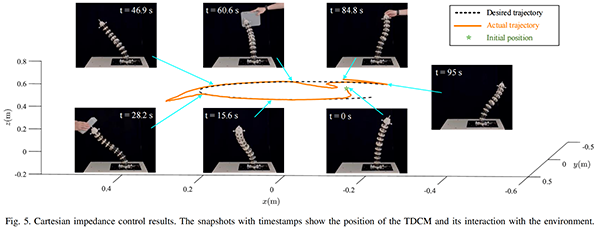
NOKOV度量动作捕捉为本研究提供执行器高精度实时位姿数据(图5),验证了阻抗控制与容错控制结合的有效性以及系统鲁棒性。
作者介绍:
郑先杰,南京理工大学自动化学院博士研究生。主要研究方向:连续型机器人建模与控制;
余朝宝,南京理工大学自动化学院博士研究生。主要研究方向:柔顺控制,智能机器人控制;
丁萌,南京理工大学自动化学院博士。主要研究方向:连续型机器人建模与控制;
刘辽雪,南京理工大学自动化学院副教授。主要研究方向:空间机器人技术,连续型机器人控制;
郭健,南京理工大学自动化学院教授、博士生导师。主要研究方向:智能控制、机器人控制;
郭毓,南京理工大学自动化学院教授、博士生导师。主要研究方向:智能机器人控制、航天器姿态控制等。






