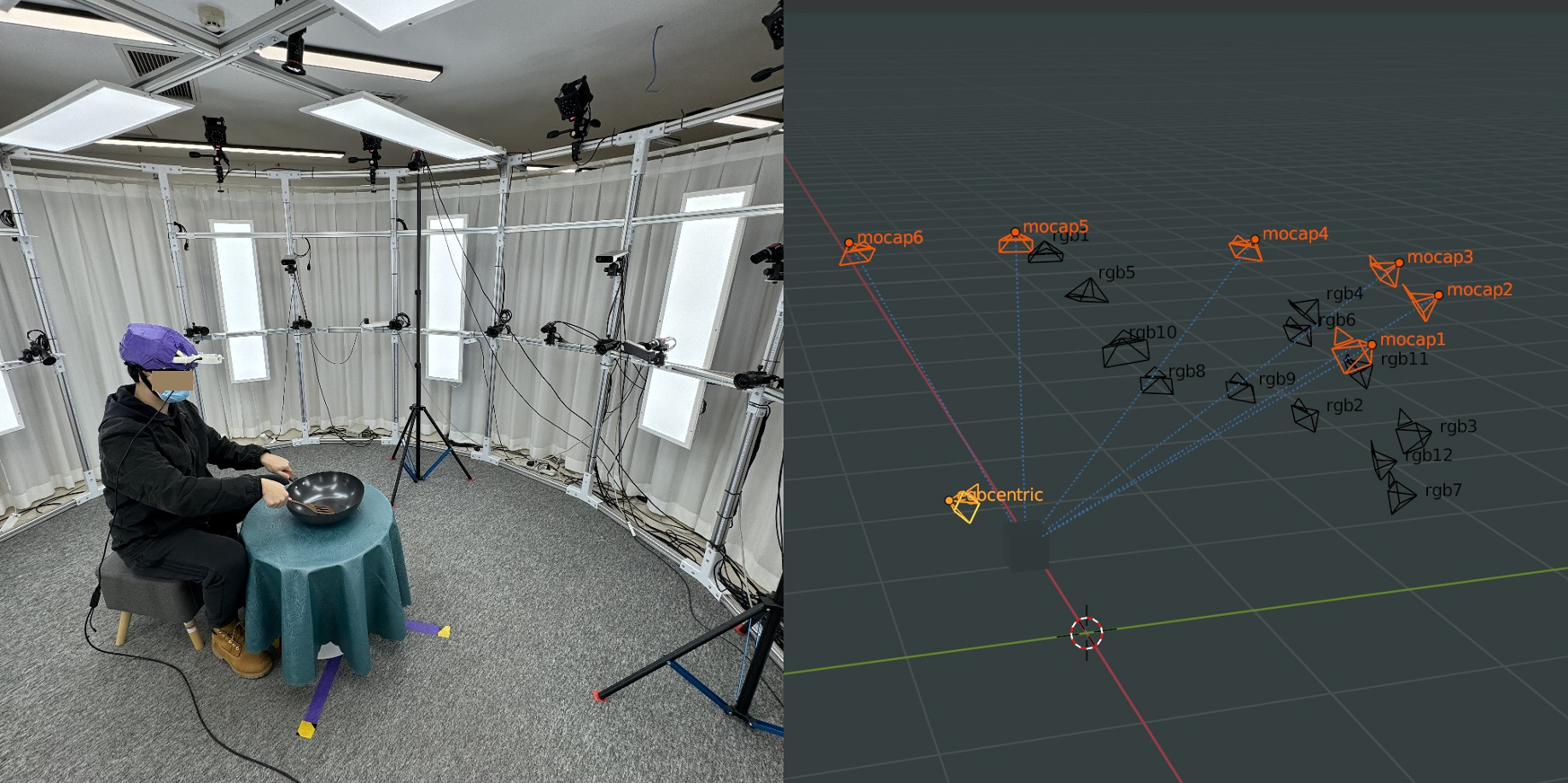

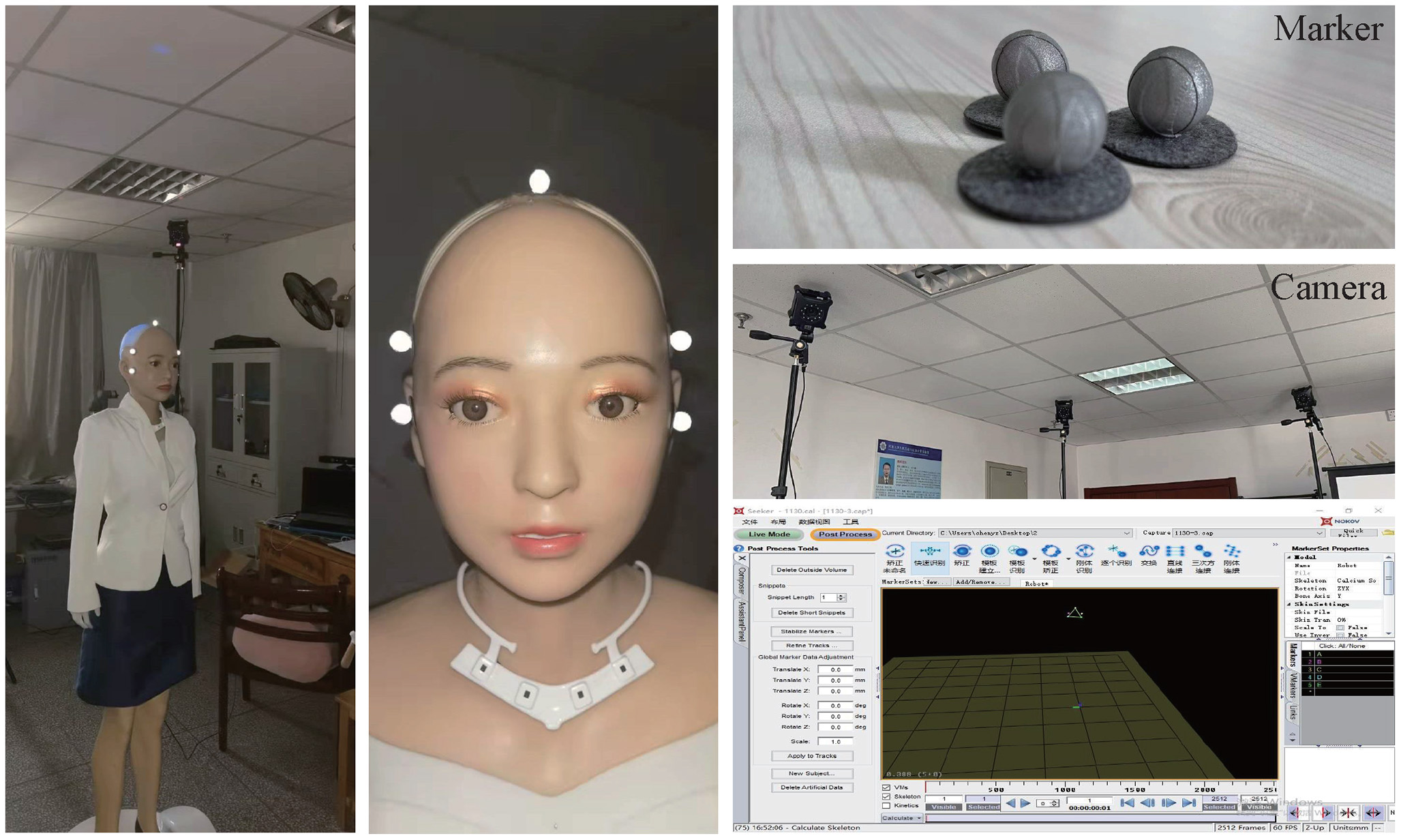
 亚毫米级精度
亚毫米级精度光学+惯性双模系统,定位精度达亚毫米级,角度精度0.1°
多目标多模态可同步捕获人体、工具、物体、机器人等多主体运动。可结合力传感、肌电、视频等设备实现多模态数据齐录制。
实时输出集成支持实时数据输出,兼容ROS/ROS2、SDK、VRPN接口,无缝对接仿真/控制平台。
场景灵活适配小型实验室到大空间均可部署,支持可穿戴与无穿戴(AI Markerless)两种方案,满足不同采集需求。
高质量数据集提供1000+小时,10万条基于NOKOV动捕设备采集并清洗后的人体高质量源数据。
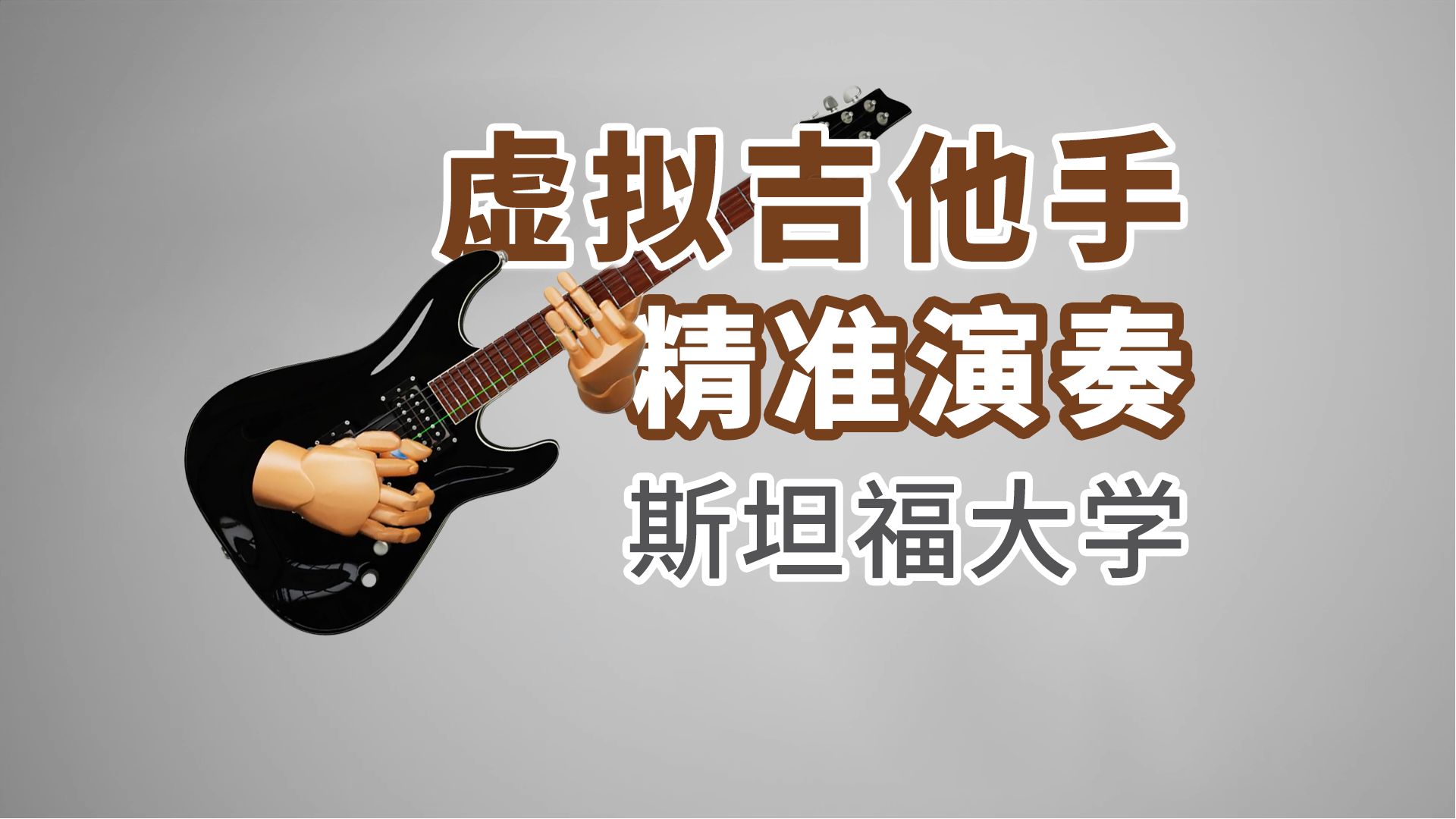 手指细节捕捉
手指细节捕捉支持多摄像头近景捕捉,精确记录手部抓取、敲击等微小位移和姿态变化。
操作协同演示可捕捉手指、工具和物体在交互过程中的运动轨迹,方便机器人学习完成贴合现实场景的操作。
智能数据集成可构建灵巧操作数据集,结合深度学习方法优化机器人抓取、插拔等技能。
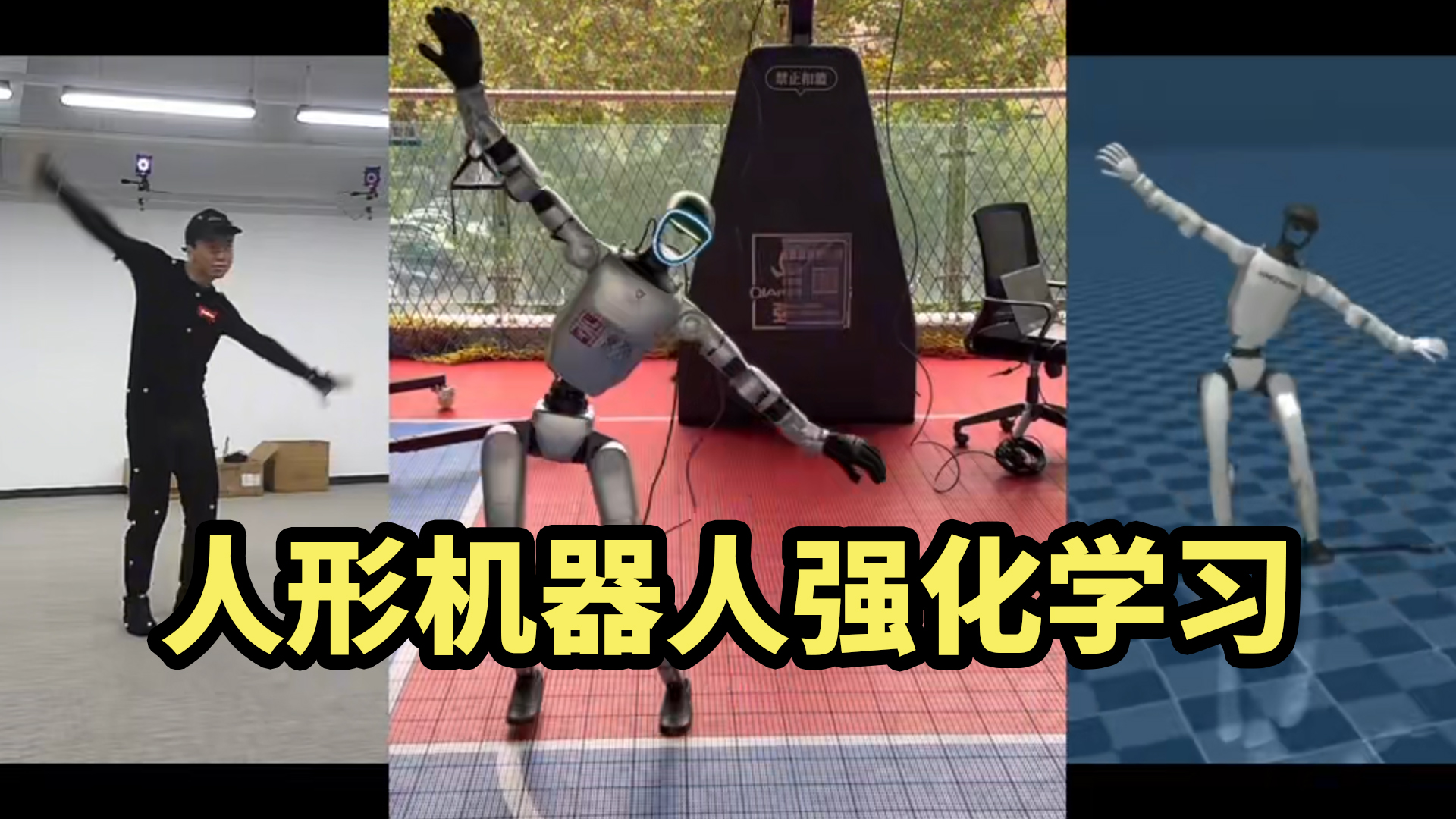 高质量示教数据转化
高质量示教数据转化将光学动捕采集的人类动作数据,通过动作重定向与动力学优化,转化为机器人可学习、可训练的专家数据。
面向机器人本体的动作适配基于机器人 URDF / MJCF 模型,结合关节自由度、关节限位和运动学结构差异,对人类动作进行适配,使动作更符合目标机器人本体的可执行空间。
批量仿真支持基于模仿学习和强化学习算法,实现动作捕捉采集的高质量数据的精准重定向与批量仿真,极大提升训练速度。
对接仿真训练与策略学习流程支持接入 MuJoCo、Isaac 等仿真训练环境,将重定向后的动作数据用于运动策略训练、微调和优化,支撑机器人动作复现、全身协调与运动能力提升。
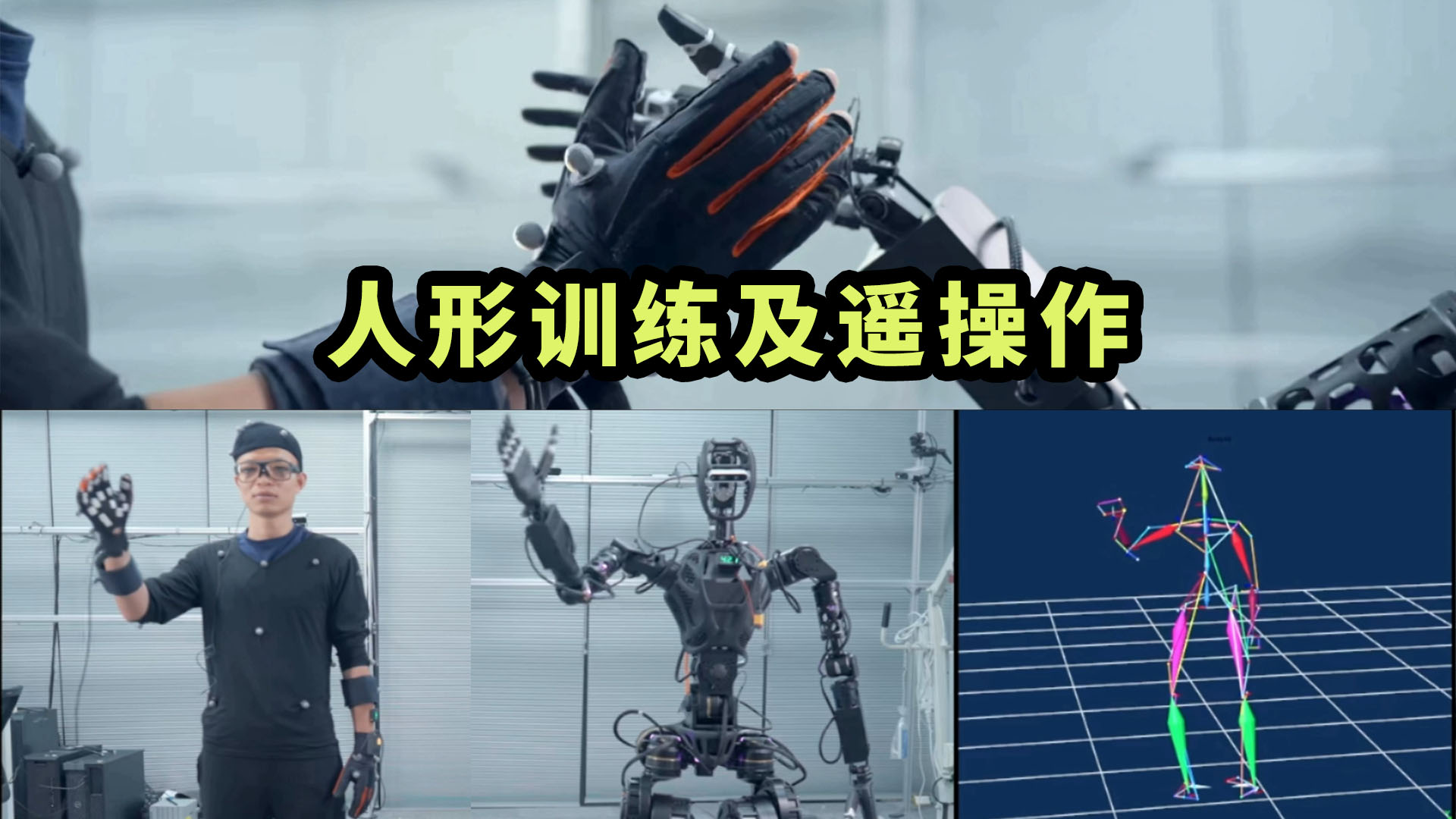 实时跟踪
实时跟踪系统延迟极低,动作捕捉数据实时传输,确保操作者每个动作都能即时反馈到机器人。
主流人形机器人URDF支持与定向开发支持智元H2 URDF,支持宇树U1/H1 URDF, 支持自定义URDF
支持智元H2 URDF | 支持宇树 U1/ H1 URDF | 自定义 URDF支持 |
 Sim-to-Real闭环验证
Sim-to-Real闭环验证从仿真与实体机器人数据的量化对比建立,到实体数据反馈进入训练模型,驱动持续优化。
支持位置对比、速度对比、加速度对比支持自定义评判指标配置、支持自定义标准配置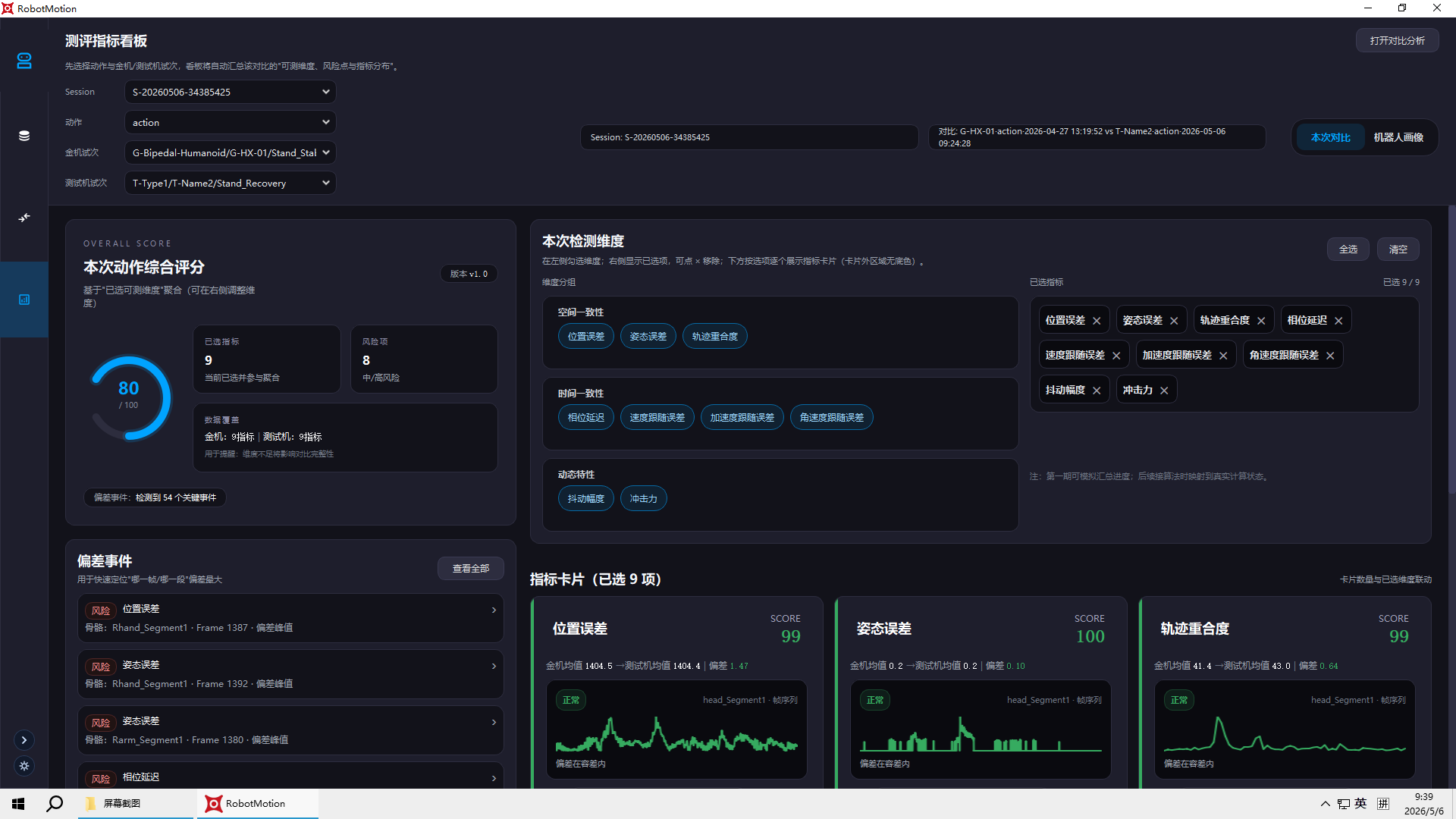 通用机器人动作测评平台
通用机器人动作测评平台解决机器人批量生产一致性问题
 多机型快速适配开发
多机型快速适配开发基于自研重定向和训练模型,实现对宇树机器人、智元机器人等多种主流机器人的快速适配,支持定向开发;
身外化身实时驱动实现身外化身功能,支持走、跑、跳等多种动作,动作复现低延迟、流畅性高