
近日,浙江大学郝耀耀老师研究团队在Nature Communications上发表题为“Cortical representation of multidimensional handwriting movement and implications for neuroprostheses”的论文,首次系统揭示了大脑运动皮层对手写运动的多维编码机制,为下一代高性能手写BCI奠定了理论基础。这项研究不仅刷新了对运动控制的认知,更提供了一套全新的解码范式。
引用格式: Wang, Z., Xu, G., Yu, B. et al. Cortical representation of multidimensional handwriting movement and implications for neuroprostheses. Nat Commun (2026). https://doi.org/10.1038/s41467-026-70536-7
研究现状与局限:
传统视角:二维轨迹
主要盲区:缺失多维信息(力学、三维空间)
研究思路:以健康受试者多维运动数据为外部先验模板,对瘫痪受试者皮层神经信号进行逆向映射与语义解码
核心技术方法:
神经编码定量分析 - 线性-非线性泊松(LNP)模型
线性解码(对比验证)- 卡尔曼滤波器(KF)
非线性解码(最终输出)- 长短期记忆网络(LSTM)
字符匹配识别 - 动态时间规整(DTW)
统计检验(贯穿全程)- 配对Wilcoxon符号秩检验
多维数据采集平台:
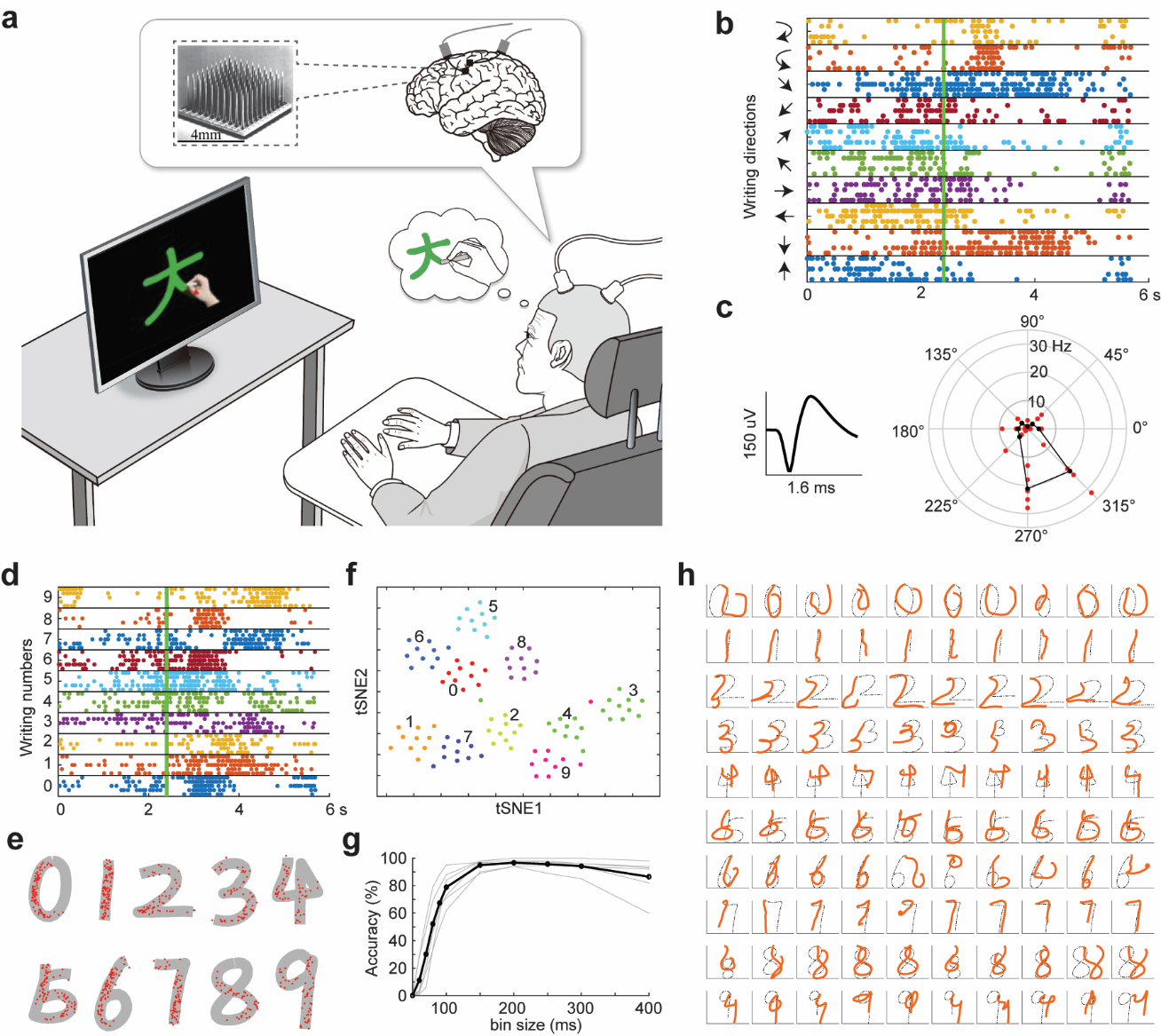
NOKOV度量光学动作捕捉系统 - 实时输出笔尖三维速度(Vx, Vy, Vz)
薄膜压力传感器 - 测量三指握力与笔尖书写压力
Myo表面肌电臂环 - 测量前臂8通道肌电包络
关键对比实验及结果:
单模型 vs. 双模型:双模型在笔画(0.63→0.69)和抬笔(0.72→0.86)的解码相似度均显著优于单模型(p<0.0001),证实分离建模的必要性
二维编码 vs. 多维编码(增量拟合):笔画阶段:加入握力、压力、EMG后编码性能显著提升(p<0.0001),Vz无贡献;抬笔阶段:加入Vz及所有附加维度均显著提升,全维模型bits/spike最优(0.07±0.02)
全模型逐一删除变量:删除EMG或三维速度导致笔画与抬笔编码均显著下降;删除Vz仅导致抬笔编码显著下降,确认其对抬笔的独特贡献;删除握力/压力未显著下降,表明其信息可被其他维度替代
二维解码 vs. 多维解码(DTW识别):二维解码准确率:29.22% ± 19.87%;。加入z轴速度、握笔力或压力等附加信息后,识别准确率显著提高。尤其是,解码三维速度和压力用于识别时,准确率达到49.96% ± 19.48%,显著优于仅解码三维速度的模型
本文贡献:
首次揭示手写运动中笔画与提笔的神经编码差异,并证明大脑编码多维运动参数;提出利用健康人模板映射瘫痪患者神经活动的新范式,可推广至其他运动想象BCI;多维解码将字符识别率提升70%以上,为临床实用化奠定基础。
NOKOV度量动捕系统用于采集手写三维运动数据,构建神经解码所需的多维 ground truth,提升BCI手写建模与识别能力。






