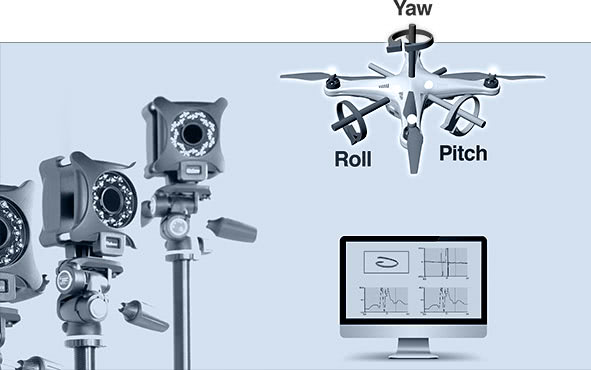
NOKOV可实现高精度实时室内定位与运动追踪,对六自由度位姿数据与关节角度等运动学数据进行采集。可通过 VRPN 传输数据,提供丰富的 SDK 插件,与各类平台实现数据传输,支持二次开发。可运行在 Windows、Mac、Linux、安卓、麒麟等操作系统,支持 PX4、ROS、Raspberry Pi 等开发平台,可对接 C++、Python、Matlab、Simulink、Labview 等编程语言。
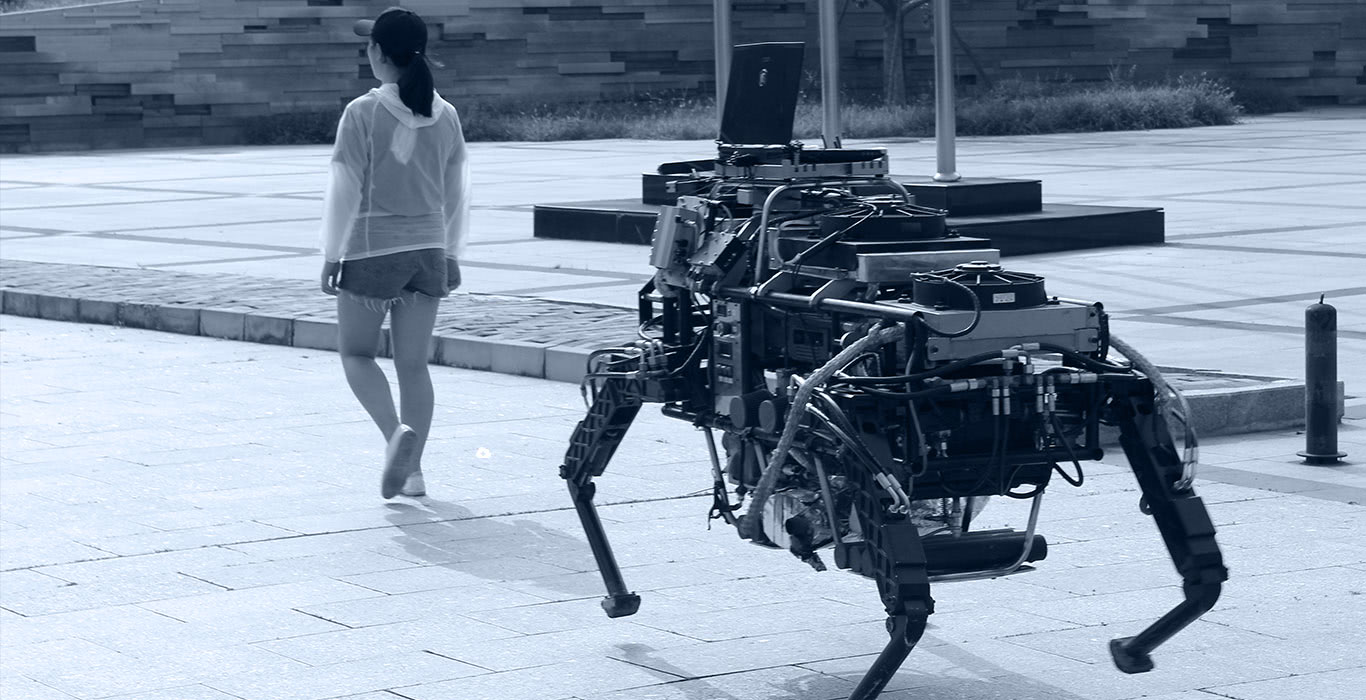
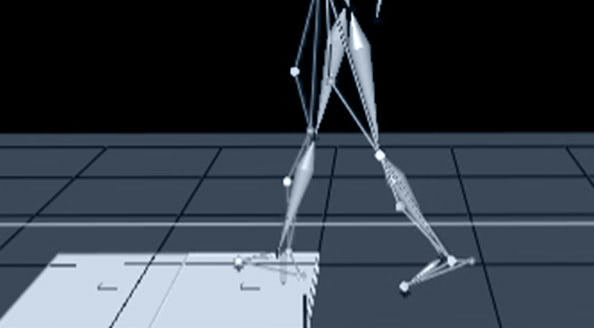
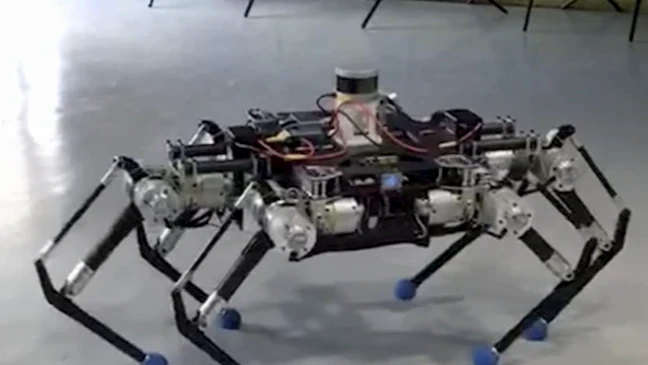
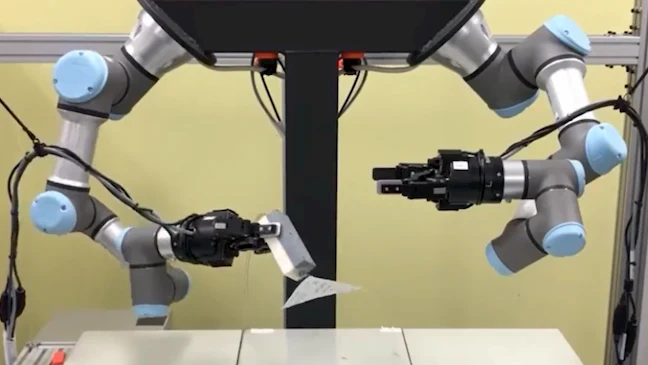
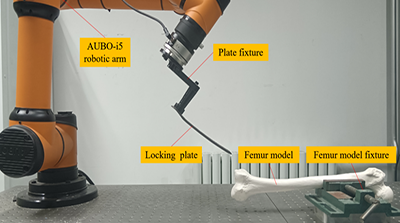
在机械臂、机械手、仿人机器人、仿生机器人、四足/六足机器人、外骨骼机器人、机器人化动力假肢等多刚体的研究中,NOKOV可实时 获取多刚体结构的关节角度与六自由度数据信息,并支持数据导出。
多刚体一键创建;智能体驾驶舱图形化界面
实现数据同步采集、集成管理
适用于连续体机器人、软体机器人、仿生学研究