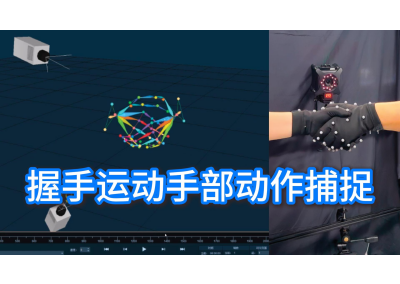
国防科技大学“智行者”人形机器人 团队在IROS 2025上获得IROS EXPO最佳展示奖! 研究团队构建了“数据采集-遥操作-技能迁移”的技术路径:通过覆盖上肢全活动范围的NuExo外骨骼系统同步采集多模态人体运动数据,并经由统一控制框架,实现了人类灵巧操作技能向“智行者”人形机器人的高效迁移。 NOKOV度量光学动捕系统为本研究提供高质量训练数据,助力实现“智行者”人形机器人在复杂环境中精准、实时的动作控制。