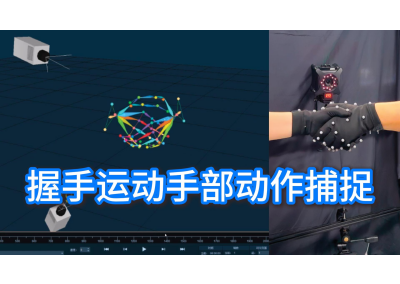
上海杉达学院-艺术设计与传媒学院结合度量光捕与数据手套,在虚幻引擎中进行数字人与XR展示。NOKOV度量光学动作捕捉系统,可与数据手套进行集成,高精度捕捉动捕演员的手势和肢体动作,使数字人贴近真人表演细节。