English
日本語
Русский
机器人无人机
机器人无人机
无人机集群、协同控制和移动机器人
NOKOV 度量动作捕捉的天地空多智能体的协同控制
外骨骼机器人
使外骨骼机器人运动步态更加拟人化,实现人机共融
仿生机器人
提供仿生机器人的步态和运动的追踪定位
手部动作捕捉与灵巧手
涵盖灵巧手、机械臂、软体机器人等应用
机械臂
提供高精度六自由度运动学数据,实现机械臂的精准定位
船舶、海洋和水下应用
水动力实验室中,船舶或水下运动物体六自由度运动数据获取
医疗机器人&高精度手术导航
手术导航、手术机器人、连续体机器人、软体机器人
位移测量&大范围三坐标测量
快速获取位移和变形信息
虚拟现实
运动康复
传媒娱乐
数字人虚拟直播
影视动画动捕实训室
虚拟拍摄/XR
游戏、影视动画制作
产品
动作捕捉系统选配
相机
Mars系列
水下动捕相机
Pluto系列
Orbit系列
软件
同步设备
配件
AI Markerless动作捕捉
Astra无标记点
动作捕捉系统
动作捕捉系统套装
VRT动作捕捉系统套装
机器人开发平台
Crazyflie & Crazyswarm
多智能体集群编队实验平台
开发者工具
多模态数据捕获与管理
集成产品
查看全部集成产品
资源及支持
技术资讯
经典案例
相关论文
常见问题
经典案例
全部
虚拟现实
生命科学
传媒娱乐
机器人与工程
机器人辅助手术
手部捕捉
路径规划
轨迹规划
运动规划
末端执行器
触觉
遥操作
学习
位移
协同
海洋与水下
视觉
人机交互/人机协作(不包含外骨骼)
灵巧手
控制
感知
定位
导航
操纵
编队/集群
避障/防撞
SLAM
特殊
动物
人体
连续体机器人
可穿戴设备
多机器人系统
移动机器人
机械臂
外骨骼
无人机/无人车
仿生机器人
医疗机器人
巡检机器人
软体机器人
人形机器人
农业机器人
轮足机器人
并联机器人
通过仿生指尖接触事件实现三指机械手的连续自适应步态控制
研究人员在《Biomimetic Intelligence and Robotics》发表了题为《Continuous adaptive gaits manipulation for three-fingered robotic hands via bioinspired fingertip contact events》的文章,探讨了通过仿生方法提升三指机械手灵活性与自适应性的技术。
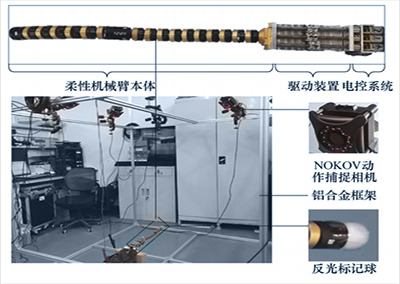
动作捕捉系统用于柔性机械臂的末端定位控制
四川大学电气工程学院的研究人员为了准确记录柔性机械臂运动过程中末端位置的变化数据,在机械臂本体上方布置了NOKOV光学动作捕捉系统,并在柔性臂末端放置了一个反光标记球,利用动作捕捉相机来跟踪采集末端位置的实时数据。
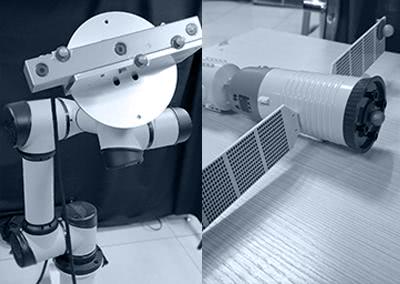
视觉位姿检测的精度验证
NOKOV 度量动作捕捉系统获取目标卫星模型与机械臂三维坐标,从而计算出卫星模型与机械臂的相对位置关系,以动作捕捉设备获取的相对位置作为真值,可有效验证视觉定位算法的精度与有效性。
运动捕捉系统和人工神经网络ELM联合校准提升工业机器人的绝对精度
同济大学航力学院使用一种新的校准方法,利用运动捕捉系统和人工神经网络(ELM)来增加工业机器人的绝对精度。
联系我们
如需更多应用、案例信息或产品报价,请致电 010-64922321,或在下方留言:
机器人/无人机
VR/AR/XR
运动康复
传媒娱乐
提交
北京度量科技有限公司(总部)
北京市朝阳区安慧里四区15号五矿大厦8层820室
info@nokov.com
010-64922321
提交成功!请您耐心等待!
欢迎关注公众号,获取更多信息
关闭