English
日本語
Русский
机器人无人机
机器人无人机
无人机集群、协同控制和移动机器人
NOKOV 度量动作捕捉的天地空多智能体的协同控制
外骨骼机器人
使外骨骼机器人运动步态更加拟人化,实现人机共融
仿生机器人
提供仿生机器人的步态和运动的追踪定位
手部动作捕捉与灵巧手
涵盖灵巧手、机械臂、软体机器人等应用
机械臂
提供高精度六自由度运动学数据,实现机械臂的精准定位
船舶、海洋和水下应用
水动力实验室中,船舶或水下运动物体六自由度运动数据获取
医疗机器人&高精度手术导航
手术导航、手术机器人、连续体机器人、软体机器人
位移测量&大范围三坐标测量
快速获取位移和变形信息
虚拟现实
运动康复
传媒娱乐
数字人虚拟直播
影视动画动捕实训室
虚拟拍摄/XR
游戏、影视动画制作
产品
动作捕捉系统选配
相机
Mars系列
水下动捕相机
Pluto系列
Orbit系列
软件
同步设备
配件
AI Markerless动作捕捉
Astra无标记点
动作捕捉系统
动作捕捉系统套装
VRT动作捕捉系统套装
机器人开发平台
Crazyflie & Crazyswarm
多智能体集群编队实验平台
开发者工具
多模态数据捕获与管理
集成产品
查看全部集成产品
资源及支持
技术资讯
经典案例
相关论文
常见问题
经典案例
全部
虚拟现实
生命科学
传媒娱乐
机器人与工程
机器人辅助手术
手部捕捉
路径规划
轨迹规划
运动规划
末端执行器
触觉
遥操作
学习
位移
协同
海洋与水下
视觉
人机交互/人机协作(不包含外骨骼)
灵巧手
控制
感知
定位
导航
操纵
编队/集群
避障/防撞
SLAM
特殊
动物
人体
连续体机器人
可穿戴设备
多机器人系统
移动机器人
机械臂
外骨骼
无人机/无人车
仿生机器人
医疗机器人
巡检机器人
软体机器人
人形机器人
农业机器人
轮足机器人
并联机器人
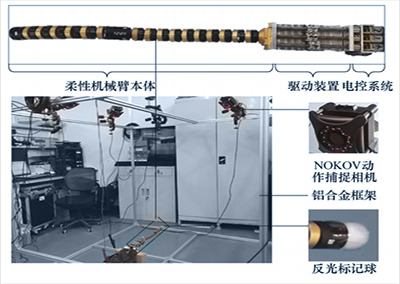
动作捕捉系统用于柔性机械臂的末端定位控制
四川大学电气工程学院的研究人员为了准确记录柔性机械臂运动过程中末端位置的变化数据,在机械臂本体上方布置了NOKOV光学动作捕捉系统,并在柔性臂末端放置了一个反光标记球,利用动作捕捉相机来跟踪采集末端位置的实时数据。
动作捕捉系统用于地下隧道移动机器人定位与建图
地下隧道移动机器人自主智能的完成任务,精准的定位和地图构建是前提和关键,利用NOKOV度量动作捕捉系统可获取机器人的真实轨迹。
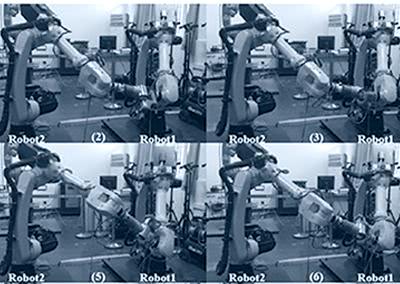
工业机器人动作捕捉与协作定位研究
工业机器人协作控制研究中,需要解决双机器人协作的运动轨迹规划、双机器人协作系统的建模、以及双机器人协作的位置/力协调控制等问题,研究中使用NOKOV动作捕捉设备来确定机器人末端工件的位姿。
未知复杂环境的无人机自主目标搜寻
四川大学电子信息学院杨鑫松老师团队实现大迷宫及复数楼层无人机自主目标搜寻。仿真实验中使用PX4仿真器,能在完全未知的复杂环境下自主搜寻目标,并将目标位置在构建的地图上标注。
无人机斜钻方圈
研究提出了一种名为Gap-Traversing Adaptive Curriculum Learning (GTACL) 的创新方法,使四旋翼无人机能够快速且敏捷地穿越移动且倾斜的狭窄间隙。该方法结合了自适应课程强化学习(ACRL)和在线推力更新(OTU),通过模拟训练后能够实现无需微调的零样本转移到现实世界的四旋翼无人机上。
基于连续隐式SDF的任意形状机器人轨迹优化
该研究利用连续隐式有符号距离场(SDF),对复杂形状机器人的几何形状及扫掠体进行精确建模,获得更大的轨迹规划求解空间。同时,规避了复杂的环境表示,具有很高的计算效率。连续隐式SDF的使用也让该方法实现了连续避障。
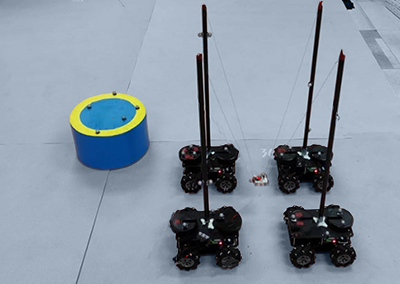
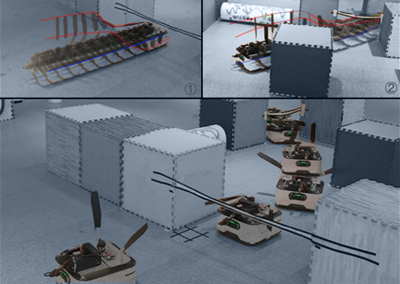
一种复杂障碍环境中基于在线规划的无人机编队安全控制方法
本文介绍了一种基于履带式移动机器人的多机器人协作运输系统,可在非平整路面协同运输60公斤的有效载荷。
自动驾驶 | 面向矿区装卸载作业场景的无人卡车的轨迹规划
本文提出了一种分层规划策略,帮助在露天矿山的装卸载作业区域中实现安全、高效率、高质量的轨迹规划。
基于单个惯性传感器的任意空间轨迹重建
研究团队建立了一种流形深度学习方案,该方案通过几何模型库实现对高维轨迹流形的低维表示,从而降低深度学习方法的学习成本,最终实现基于单个惯性传感器的任意运动追踪与轨迹重建。
一种双模式机器人辅助股骨干骨折钢板植入方法
本文结合起点确定算法、运动捕捉、深度学习和机器人技术,提出了一种双模式机器人辅助钢板植入方法。
基于 RRT* 的连续体机器人高效轨迹规划方法——ICRA 2024 入选论文
ICRA 2024 最新入选论文,南方科技大学孟庆虎院士团队提出基于 RRT* 的连续体机器人高效轨迹规划方法。
面向新手在无人机竞速场景下的飞行辅助系统
浙江大学 FAST Lab 高飞老师团队钟宇航同学设计了一套无人机竞速辅助飞行系统,帮助新手快速上手参与无人机竞速比赛。论文获 ICRA 三项 Best Paper 提名。在真实实验中使用NOKOV度量动作捕捉验证了系统的效率。
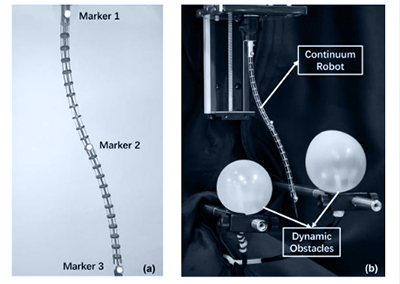
绳牵引并联机器人动态避障方法
哈尔滨工业大学(深圳)熊昊老师团队最新研究成果:提出了一种基于强化学习的避障控制器,在实验中使用NOKOV度量动作捕捉系统实时获取绳索、移动基座的位置,以及动态障碍物的位置和形状信息。
动作捕捉用于差速驱动移动基座的可变形机器人轨迹优化研究
浙江大学为解决可变形机器人在复杂三维环境中的轨迹规划问题,提出一种基于差速驱动移动基座的移动机器人的轨迹优化方法,并使用NOKOV动作捕捉设备验证了该方法的有效性。
动捕技术助力基于映射规划框架的四旋翼飞行器自主导航研究
哈尔滨工业大学提出一种新的映射规划框架,以提高四旋翼飞行器在复杂环境下的自主导航能力,并使用NOKOV动作捕捉设备验证了该框架的有效性和鲁棒性。
联系我们
如需更多应用、案例信息或产品报价,请致电 010-64922321,或在下方留言:
机器人/无人机
VR/AR/XR
运动康复
传媒娱乐
提交
北京度量科技有限公司(总部)
北京市朝阳区安慧里四区15号五矿大厦8层820室
info@nokov.com
010-64922321
提交成功!请您耐心等待!
欢迎关注公众号,获取更多信息
关闭