手术机器人环境感知 | M. Ali Nasseri教授采访
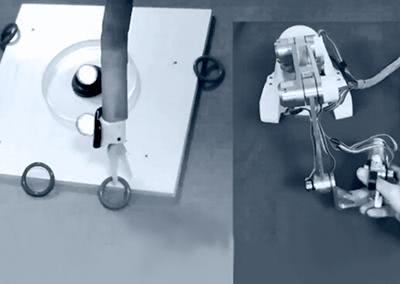
度量用户、慕尼黑工业大学手术机器人教授M. Ali Nasseri 与团队开发了首个用于眼科微创手术的机器人系统,帮助眼科医生进行视网膜手术。 在 IROS 2024 上,M. Ali Nasseri 教授因其学术成就入选由度量动捕发起的 New Generation Star Project。在本次采访中,Nasseri 教授介绍了其在手术机器人领域的研究工作,以及如何通过NOKOV度量动作捕捉系统实时重建手术环境、助力手术机器人高精度定位。