Nature Commun. 手写脑机接口 多维运动解码
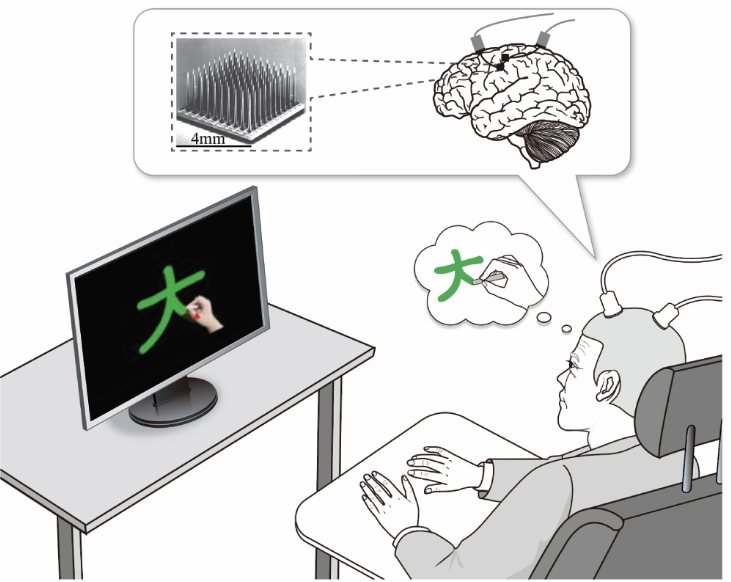
近日,浙江大学郝耀耀老师研究团队在Nature Communications上发表题为“Cortical representation of multidimensional handwriting movement and implications for neuroprostheses”的论文,首次系统揭示了大脑运动皮层对手写运动的多维编码机制,为下一代高性能手写BCI奠定了理论基础。这项研究不仅刷新了对运动控制的认知,更提供了一套全新的解码范式。