1.7mm超薄巡检软机器人在《自然通讯》发表 | 诺丁汉东昕教授采访 @ROBOSOFT 2025
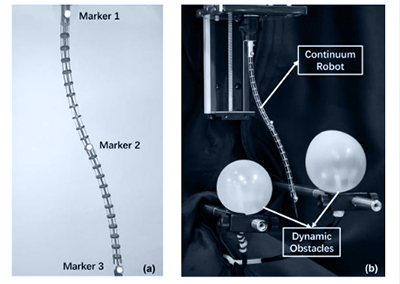
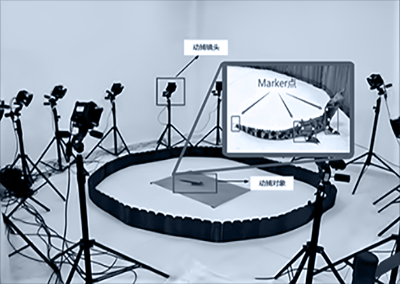
度量用户、诺丁汉东昕教授带领团队在Nature Communications(《自然·通讯》)期刊发表关于1.7mm超薄巡检软体机器人的研究成果,并在 ROBOSOFT 2025 上作现场报告。 本文提出的超薄机器人为无需拆解的原位巡检设计,解决航空航天与核能产业的“狭缝巡检”难题,突破缝隙巡检机器人尺寸限制,并在狭缝中实现多运动模式,如爬行、攀爬、游动、转向等。 NOKOV度量动作捕捉系统为软体机器人与连续体机器人研究提供可靠技术支持。如,连续体形态反馈、软体位移跟踪、控制算法评估等。关注我们了解更多应